研究室で得られた初期の成果と、ワンチップマイコン関係を紹介します(研究成果 その1)
73. Создание базовой работы датчика гироскопа L3GD20 с использованием PIC
登録日 2015年 4月 4日
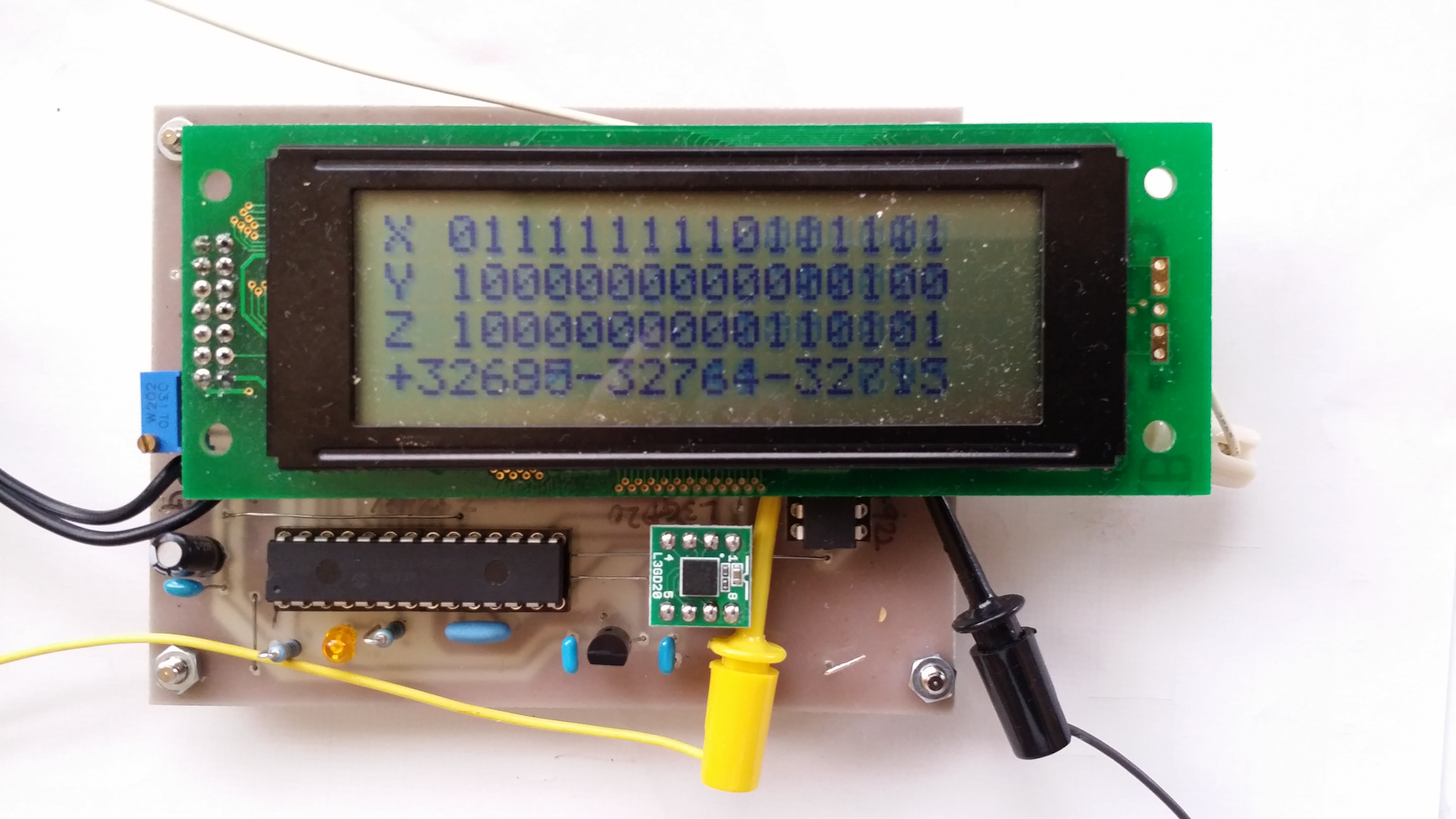
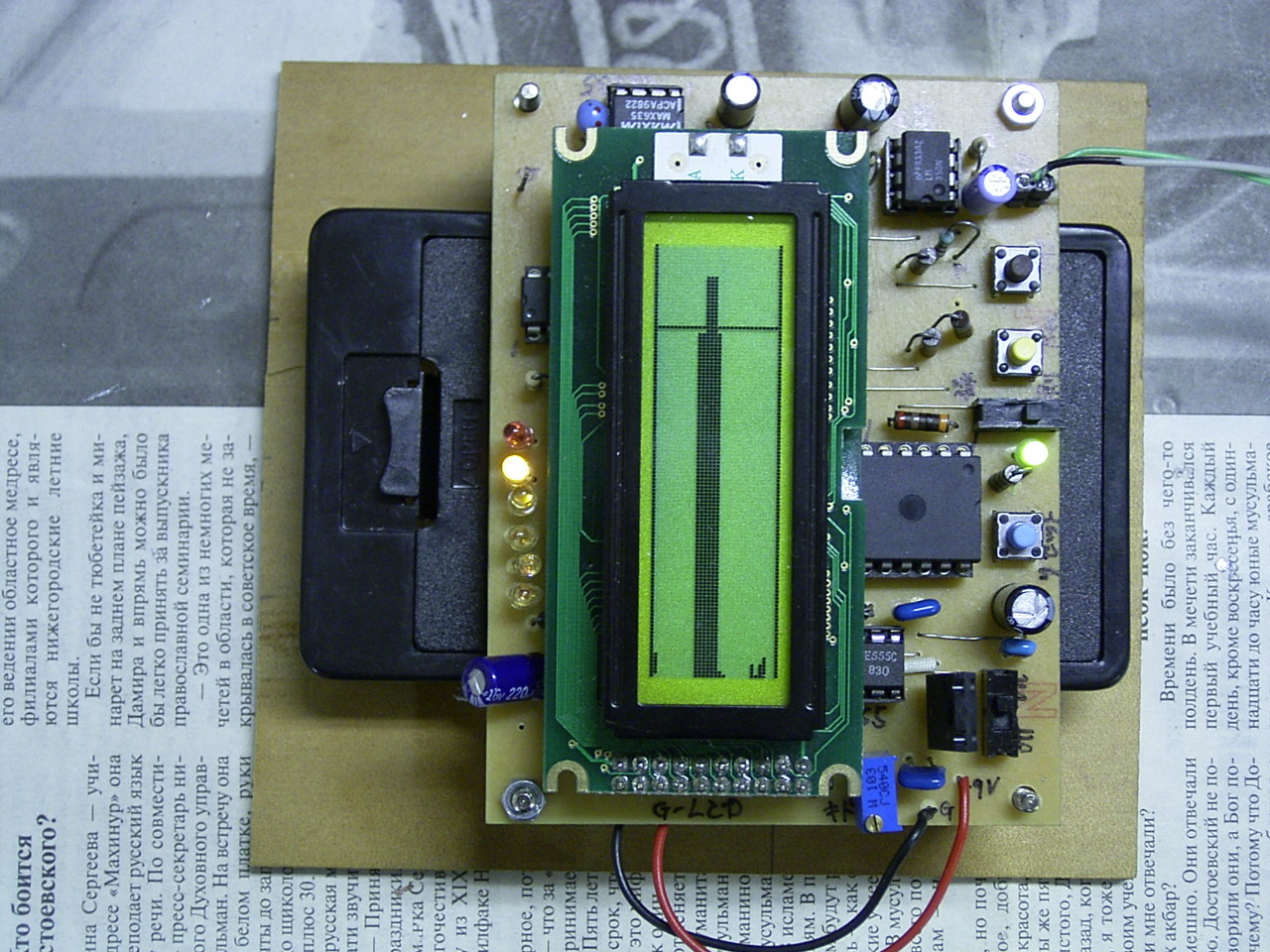
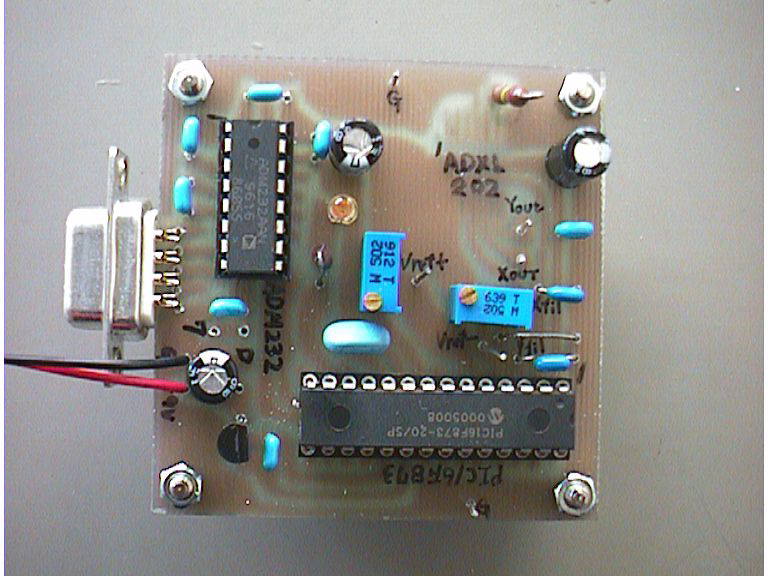
秋月電商で販売している3軸ジャイロセンサーL3GD20をPICで取り扱える基本動作を純正アセンブラで書き上げました。ネットでPIC+L3GD20の使用例を見つけることができませんでしたので、この組み合わせを希望している人には 参考になると思います。その他に、4行20桁のLCD,12ビットDA変換器も付加しました。必要に応じて使用できます。写真が試験中の現品です。
本来の目的には未だ達していませんが、開発にタッチしてから3ヶ月もずるずると過ぎてしましました。他の課題も幾つかあるので、この当たりで、この課題は、レポートを書き上げて、一端中断することにしました。再開するかは定かではありません。良いアイデアが浮かんだらやるでしょう。
詳細は論文を読んで下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類をダウンロードすることができます。PICに書き込むアセンブラファイルをダウンロードする
基板作成用のPCBEファイルをダウンロードする
72. Производство сверхмалых версий BCI (коробочный автомобильный интегратор)
登録日 2014年10月28日

改変版BCI制作中に、もっと簡易で、小型のBCIも作れることに気がつきました。今回の作品がそうです。BCI動作にはオシロスコープは一応必須です。オシロスコープの画面を見ながら、操作するものとしました。従って、LCDは削除され、クロスキーも削除され、必要なI/O端子も少なくなったので、使用するPICは40ピンの18F452から、28ピンの18F252に変更しました。アセンブラプログラムも極端に短くすることもできました。測定中に、ゲートパルスの遅延速度も変更できるようにもなりました。その他幾つかの「改良」を加えています。
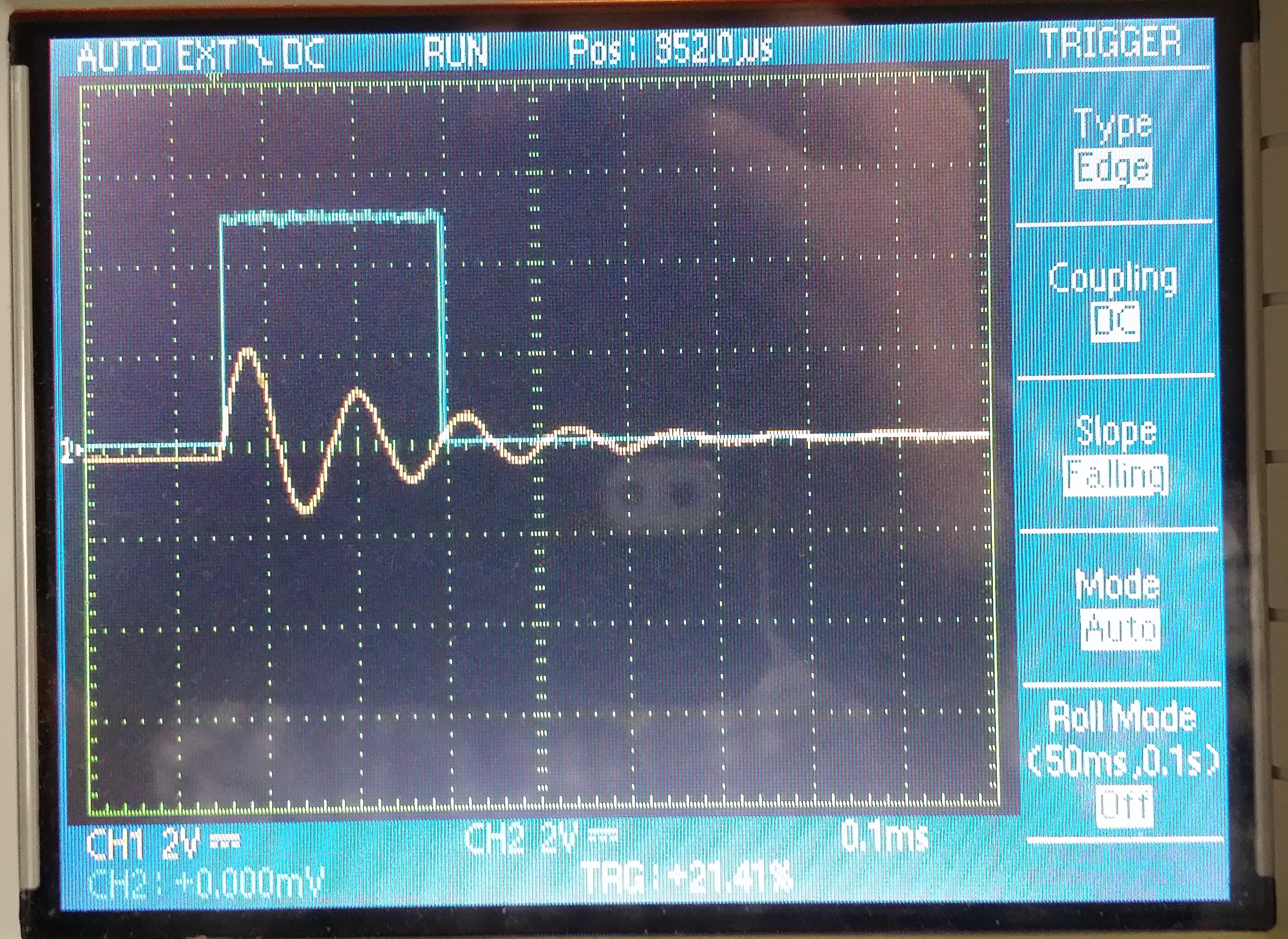
上の写真が、超小型BCIの外観、下の写真が、動作中のオシロスコープの画面です。試験信号としてLC回路の共振減衰曲線が黄色で描かれています。青色の矩形波がサンプリング&ホールド信号です。HレベルからLレベルに変化する箇所の信号がサンプリングされ出力されます。詳細は論文を読んで下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類をダウンロードすることができます。PICに書き込むアセンブラファイルをダウンロードする
基板作成用のPCBEファイルをダウンロードする
71. Производство модифицированной версии BCI (Box Car Integrator)
登録日 2014年10月17日 訂正日 2014年10月24日

BCIを新規テーマで使用する必要が出てきましたが、退職に当たって、著者の自作品はそのまま研究室においていました。その複製品を製作することにしました。が、若干の点で装置を改変しました。変更点は、(1)PIC内蔵のAD変換器を使用しないで、サンプル&ホールド素子を使用する。(2)自作のR−2R型DA変換器は削除する。(3)必要なI/O端子数が少なくなったので、40ピンのPIC18F452の代わりに、PIC18F252を使用する。
写真が制作した動作試験中の現品です。使用方法などは旧BCIをほぼ同じです。他のシステムと一緒に配置する予定なので、シャーシなどには配置していません。裸のままです。詳細は論文をダウンロードして読んで下さい。
なお、このBCIの制作中に、更なる改良ができることに気がつきました。LCDを使用しない、「超小型」BCIです。これもほぼ完成に至っています。遅くないうちに公開する予定です。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類をダウンロードすることができます。PICに書き込むアセンブラファイルをダウンロードする
基板作成用のPCBEファイルをダウンロードする
追記 重要な訂正
分かった方もいるかもしれませんが、PDF論文の3頁の「(3)端子数の少ないPICの使用」はこの論文では 削除します。新BCIの回路図から分かるように、この新BCIでは未だPIC18F452を使用していました。18F252の変更は、次のBCIでした。この論文を書き、校正している間に、次のBCIの製作に入っていました。混乱していたようです。済みませんでした。つぎのBCIは既に完成しており、「超小型BCIの製作」として遅くないうちに、アップロードする予定です。
70. Производство 32-битного Color Bar Writer от PIC (студенческая работа)
登録日 2012年 3月19日


(学生の論文より)「バーサライタは一列に並んだ光源を動かした残像によって文字などを空中に表現する装置である。従来のものは、単色の光源を使用している故に単純な絵や文字しか表現できないものがほとんどである。しかし、光源としてフルカラーLEDを用いればカラー画像なども表示することが可能となり、表現の幅と共に用途の幅も広まる。・・・」
学生が今年度の卒業研究として、32ビットカラーバーサライタを製作しました。2枚のデモ写真を示しておきます。1枚目はWindows Multi Mediaの商標です。2枚目が赤ちゃんの写真です。回路上であると思われるが、若干未だ解決していないバグがあり、1,2本不正常の線があります(そのうちに解決したいと思いますが)が、結構なカラーバーサライタの映像であると思っています。
描写したい画像を、パソコンで処理し、ワンチップマイコンであるPICにデータ列として書き込むソフトも開発しました。このソフトを使用すれば、簡単に、任意の画像を表示させることができます。
詳細は論文を参照して下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類が収まっている圧縮ファイルをダウンロードすることができます。圧縮ファイルをダウンロードする
69.汎用型データロガーの製作
69. Производство регистраторов данных(Data Logger) общего назначения
登録日 2011年10月 5日
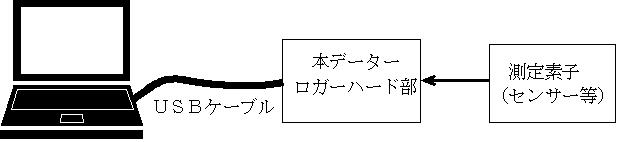
汎用のデータロガーを自作しました。概略図のとおり、製作したハード部本体とパソコンをUSBケーブルで接続します。ハード部には測定素子など任意の電圧信号を入力させます。Visual Basicで書き上げたプログラムを実行することで、センサーの信号の時間変化をパソコンの表示部に、リアルタイムでグラフとして表示させ続けることができます。
10年ほど前に公開発表したデーターロガーの別バージョンです。前回の装置では、高速サンプリングのため、測定素子からのデータをハード部で測定完了後、パソコンで読んで、グラフ表示していました。今回は、高速性は放棄し、遅速ながらリアルタイム性を求めました。また、多くの測定条件などはパソコンの画面中で設定できるようにしました。測定し保存したデータファイルは、同時に提供しているグラフ処理プログラムで自在に処理することもできます。また、詳細なグラフをプリンタで印刷出力することもできます。製作費用は5千円はかからないと思います。いろいろな部門で使用できるでしょう。 詳細は論文を参照して下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類が収まっている圧縮ファイルをダウンロードすることができます。圧縮ファイルをダウンロードする
68.繰り返しの微弱過渡現象信号の測定器(いわゆるボックス・カー・インテグレーター)の製作
68. Производство измерительных приборов (так называемых коробочных автомобильных интеграторов=Box-Car-Integrater) для повторных слабых переходных сигналов
登録日 2011年 6月 9日

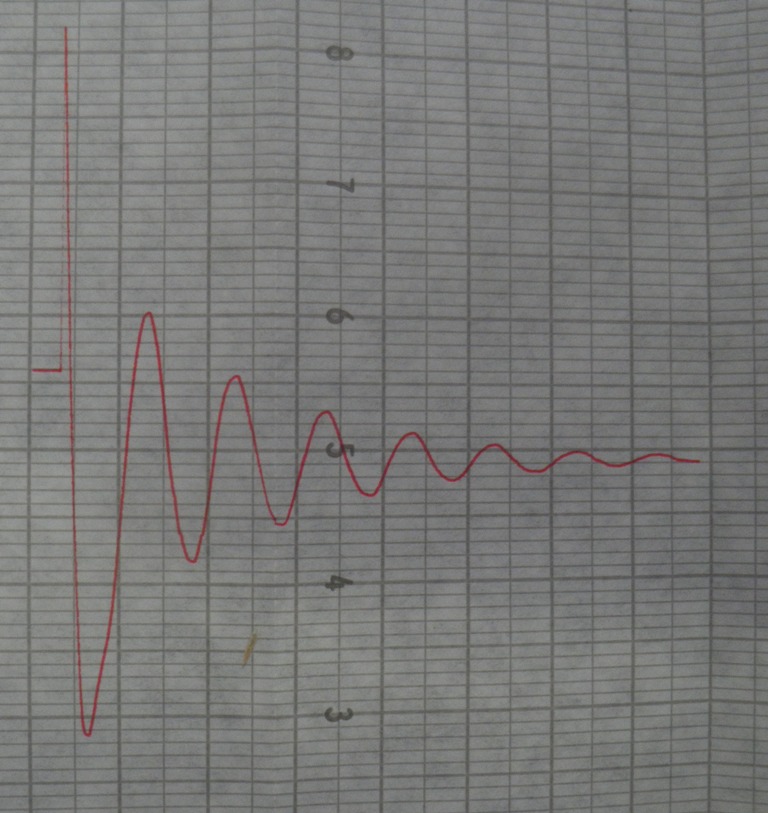
BCIを自作しました。上の写真が正面の外観です。BCIはI特定メーカーから販売されていますが、価格は非常に高価です。今回自作したBCIは、メーカー品程の高性能、多機能ではありませんが、十分にBCIとして動作します。製作費用は、1万円程度です。電子工作にある程度の知見があり、本論分類を参考にして再構築すれば、数日以内で、簡単にBCIを準備できます。回路の主素子として、マイクロチップ社のワンチップマイコンPIC18F452を使用しています。これにより、非常にコンパクトな回路となっています。本装置の使用は、LCD画面を見ながらのメニュー方式を採用しています。
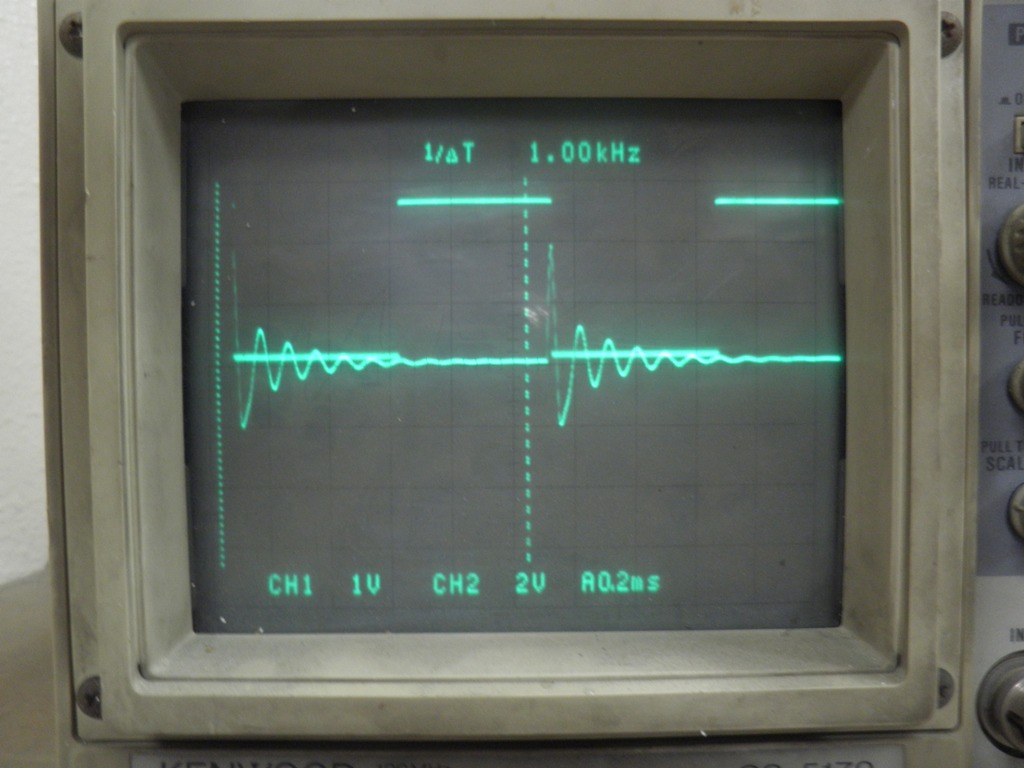
下の2枚の写真は、デモ用として、共振周波数約20kHzのLC共振回路からの出力波形を、本BCIで測定し、ペンレコーダーに出力描写したものです。
著者は、大分昔に、何十ものロジックICを組み合わせて、2種ほどのBCIを製作していました。これらの装置は両方とも、現役です。ワンチップマイコンの使用でBCIの内部が極端に単純化されたことに、時間の流れを感じています。 詳細は論文を参照して下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類が収まっている圧縮ファイルをダウンロードすることができます。圧縮ファイルをダウンロードする
67.USBメモリ・TFT液晶・タッチパネルを用いたシステムの構築(学生作)
67. Конструкция системы с использованием USB-памяти, TFT LCD и сенсорной панели (студенческая работа)
登録日 2011年 4月12日

本研究室の学生が卒業研究として製作した機器を紹介します。以前に紹介した、『PIC24FによるUSBメモリの読み書き』と『PICマイコンによるタッチパネル付きTFT液晶の制御』を組み合わせた形となっており、USBメモリから読み込んだ画像を液晶画面に表示します。操作は全てタッチパネルから行えます。上の写真は、デモ用に、金インゴットの画像(我が研究室の「室紋」です)を表示している様子です。パソコンでの画像をUSBメモリに書き込み、その後本装置に、USBメモリを差し込み、タッチ操作で読み出して、表示させています。タッチ操作で、他の画像も当然表示できます。
液晶画面は、以前と同様のYHY024006Aを使用しました。FATファイルシステムやUSBの処理も、以前と同様にMicrochip社から提供されているものを利用しています。PICマイコンは、ある程度ピン数が必要であったため、TQFP64ピンパッケージののPIC24FJ128GB106をピッチ変換基板とセットにして使用しています。
この装置は、単体で使用するには機能がまだまだ不十分です。製作論文を公開いたしますので、これを基に各々が応用機器を作り上げてほしいと考えています。もちろん、一部分だけを参考として利用して頂いても構いません。損害等の責任は負いかねますが、再配布や商用利用などは自由に行って頂いて構いません。この装置をより高性能なものに造りかえることが出来れば、近年盛んな電子書籍を自作装置で閲覧するということも実現可能であると考えています。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類が収まっている圧縮ファイルをダウンロードすることができます。圧縮ファイルをダウンロードする
66.PICマイコンによるタッチパネル付きTFT液晶の制御(学生作)
66. Управление TFT LCD с сенсорной панелью микрокомпьютера PIC (студенческая работа)
登録日 2010年10月22日

訂正について(2011年10月26日記)
論文中の「図3.回路図」において、dsPIC30F4013の端子番号の割り振りにいくつもの間違いがありました。dsPIC30F4013のテクニカルノートのピン配置図と対応した方なら、気がついたと思います。割り振っている端子番号に従って回路結線をすると、電源端子とアース端子が短絡してしまいます。気がついた方は多いかと思います。が、図3.回路図で、各端子の名称と結線回路には間違いはありません。また、「図4.パターン図」には間違いはありません。手書きで訂正した回路図を、新規ファイルとして書き換えることを忘れていたようでした。ここで、開示論文は、図3を書き改めた論文としました。すみませんでした。
論文の本文からの抜粋
「近年発売されている携帯電話には、タッチパネルが搭載された機種が数多くある。画面に直接触れて操作するため、直観的に扱いやすいという点や、他にボタンやスイッチを用意しなくてよいという大きな利点がある。現在ではインターネット通販で、タッチパネル付きの液晶や、タッチパネルそのものを簡単に入手することができるため、この制御を行うことができれば、機器の操作性の向上など、多くの恩恵を受けることが出来ると考えられる。
今回は、PICを使用して液晶とタッチパネルを制御し、簡単なお絵かきが出来るようにすることを目的として、研究・製作を行った。
使用したデバイス・素子。
・dsPIC30F4013(Microchip)
・2.4inchタッチパネル付きTFT液晶(aitendo@shopping - YHY024006A-PCB)」
写真は実演中の様子である。画面上部においてあるカラーパレットで好みのカラーを選択してから、画面をなぞれば線が自由に描かれ続ける。dsPICでタッチパネルを駆動制御している。プログラムはアセンブラで書き上げている。提示しているお絵かきは1例である。携帯電話など、タッチパネルの応用は幅広いが、実際の所それらは全てメーカー提供の機器に限定されている。本論文では、自作によるタッチパネルの制御方法を提供している。本論文を参考にすれば、PICとタッチパネルを連結し、それに必要なデバイスを付加した多様な応用開発が可能であると考えている。
本システムの詳細は論文等をダウンロードして読んで下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類が収まっている圧縮ファイルをダウンロードすることができます。圧縮ファイルをダウンロードする
65.PIC24FによるUSBメモリの読み書き(学生作)
65. Чтение и написание памяти USB с помощью PIC24F (студенческая работа)
登録日 2010年 9月29日
USBメモリは極めて便利な外部メモリです。規格も統一され、ほとんど全てのパソコンにはUSB端子がついています。 パソコンにUSBメモリを差し込むだけで、簡単にパソコンと差し込んだUSBメモリとの間でファイルなどの転送ができます。 メモリ容量も倍々ゲームのように大きくなってきています。
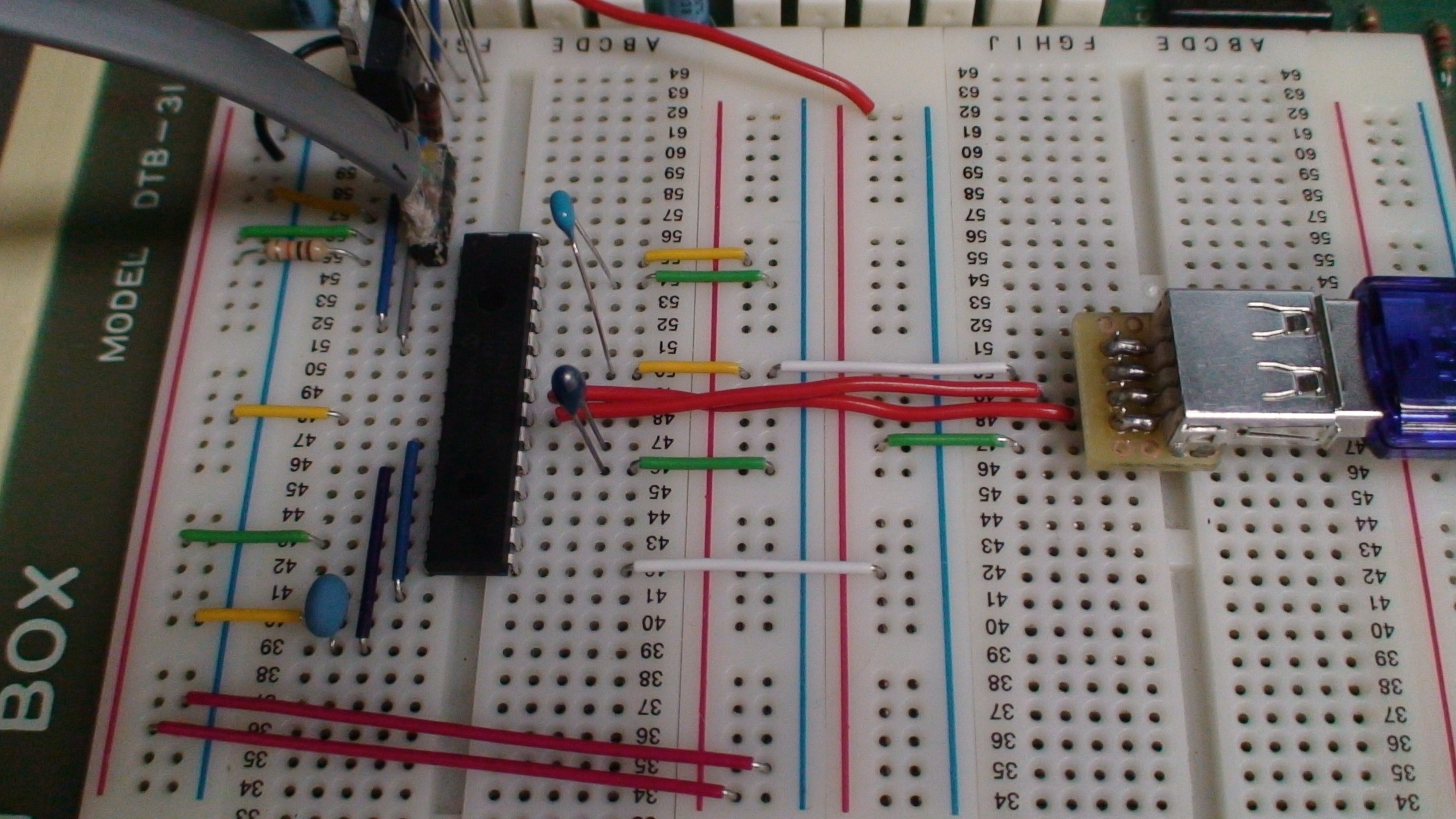
ワンチップマイコンであるPICのRAM容量はそれほど大きくない。大きいデータを保存するためには、外部メモリ素子が必要であり、シリアルRAMの使用例は、著者も幾つか公開している。これに変わって、USBメモリが外部メモリとして使用できるようになれば、と考えていた。アセンブラでかけないものかと考えていたが、C言語ならば、マイクロチップ社からサンプルプログラムが提供されていることがわかっていた。今回学生が、サンプルプログラムを利用して、簡単なデータ列ではあるが、PICとUSBメモリの間でのデータの転送を行うプログラム類を書き上げた。拡張は幾らでもできよう。十分な汎用性を持っているものと考えている。本システムの再構築を考える読者、更なる拡張を考えている読者には、十分に役に立つものと考えている。 写真はテストボード上に組みあげたシステムの外観である。
本システムの詳細は論文等をダウンロードして読んで下さい。
PDFファイル形式の論文をダウンロードすることができます。
論文をダウンロードする
開発したソフト関係類が収まっている圧縮ファイルをダウンロードすることができます。圧縮ファイルをダウンロードする
64.実数・関数演算ルーチンの改訂版
64. Пересмотренные версии реальных и функциональных арифметических подпрограмм
登録日 2010年 8月11日
最近、先年に著者の書き上げた実数・関数演算ルーチンを使用して、新たなHIDの開発を思い立った。が、プログラムの先頭部分での変数や配列変数の宣言部で、アセンブラーエラーが発生することに気が付いた。2007年に作成した「光学マウスキットを応用した卓上型経路長・面積計−その2」(1)中のPIC18F252に、その実数・関数演算ルーチンが納まっている。このプログラムで解決方法を探した。要は以下の通りである。2010年になり、マイクロチップ社の提供している最新の「MPLAB IDE v8.53」をマイクロチップ社のURLからダウンロードした。この「MPLAB IDE v8.53」中の「MPASMWIN」中のアセンブラー「MPASM V5.36」 で、参考文献(1)に付属のアセンブラプログラムをアセンブルをすると、変数・配列宣言部分がエラーを出すようになってしまっていた。なぜそのようになったのかはわからない。それではと思い、同じ文献に付属のHEXファイルのPICへの書き込みも試みた。正常に書き込めた。書き込みの点では、最新の「MPLAB IDE v8.53」には問題はない事はわかった。 あれやこれやの試行錯誤の結果、アセンブルが正常行えるようにプログラムを修正することができた。以下その報告をする。 著者の公開しているPIC関係には、上述の実数・関数ルーチンが納まっているのは少なくない。万が一、著者と同様のアセンブルの失敗に陥っているならば、本論文を参考にして、プログラムの変数宣言部分に若干の変更を加えればよいであろう。 詳細は論文等をダウンロードして読んで下さい。
PDFファイル形式の文献をダウンロードすることができます。
論文をダウンロードする
63.GPS−9号
63. GPS-9
登録日 2008年10月31日
すでに気がついて、修正した方には参考にならないでしょうが、 GPS−8号の動作に不調があることがわかりました。正常に動作し続けるときもあるが、時折、電源の入れたときの時刻を表示し続け、時刻が更新されないという不調現象です。アセンブラプログラムに、GPS−52から送信されてくるデータ列の受け入れに、対応しきれない時がありました。GPS−52は、送信するデータ列、データ内容、データ量に、時折自動変更が行われています。それに対応できていませんでした。
GPS−8号で提供しているGPS_V8.asmアセンブラプログラムの修正方法、あるいは新たにGPS_V9.asmとして正常に動作する(今のところそう考えていますが)アセンブラプログラムのソースファイルとHEXファイルを提供します。
修正は数カ所です。GPS_V8.asmに修正を加えたプログラムをGPS_V9.asmとしています。
詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
62.GPS−8号 −GeminiをGPS−52に変更−
62. GPS-8 -Gemini изменены на GPS-52 -
登録日 2008年 7月15日
著者は半自作GPSとして、今までSPA社のGeminiシリーズを使用したものをいくつか紹介してきましたが、 最近、格安でGPSレシーバを購入することができることがわかりました。SPA社のGeminiは1万5千円ほどします。が、秋葉原の秋月電子通商ではGPSレシーバとして、ポジション社のGPS−52を使用したGPSキットがなんと4800円で販売しています。Geminiの3分の一の価格です。
早速、GPSキッドを購入し、秋月指定回路でくみ上げました。正常に動作しましたが、入出力端子はRS−232C端子であり、机の上に鎮座しているディスクトップでしか使用できませんでした。そのため、シリアル−USB変換ケーブルを購入し、持ち運びのできるノートパソコンでの動作試験も行いました。正常に動作しました。
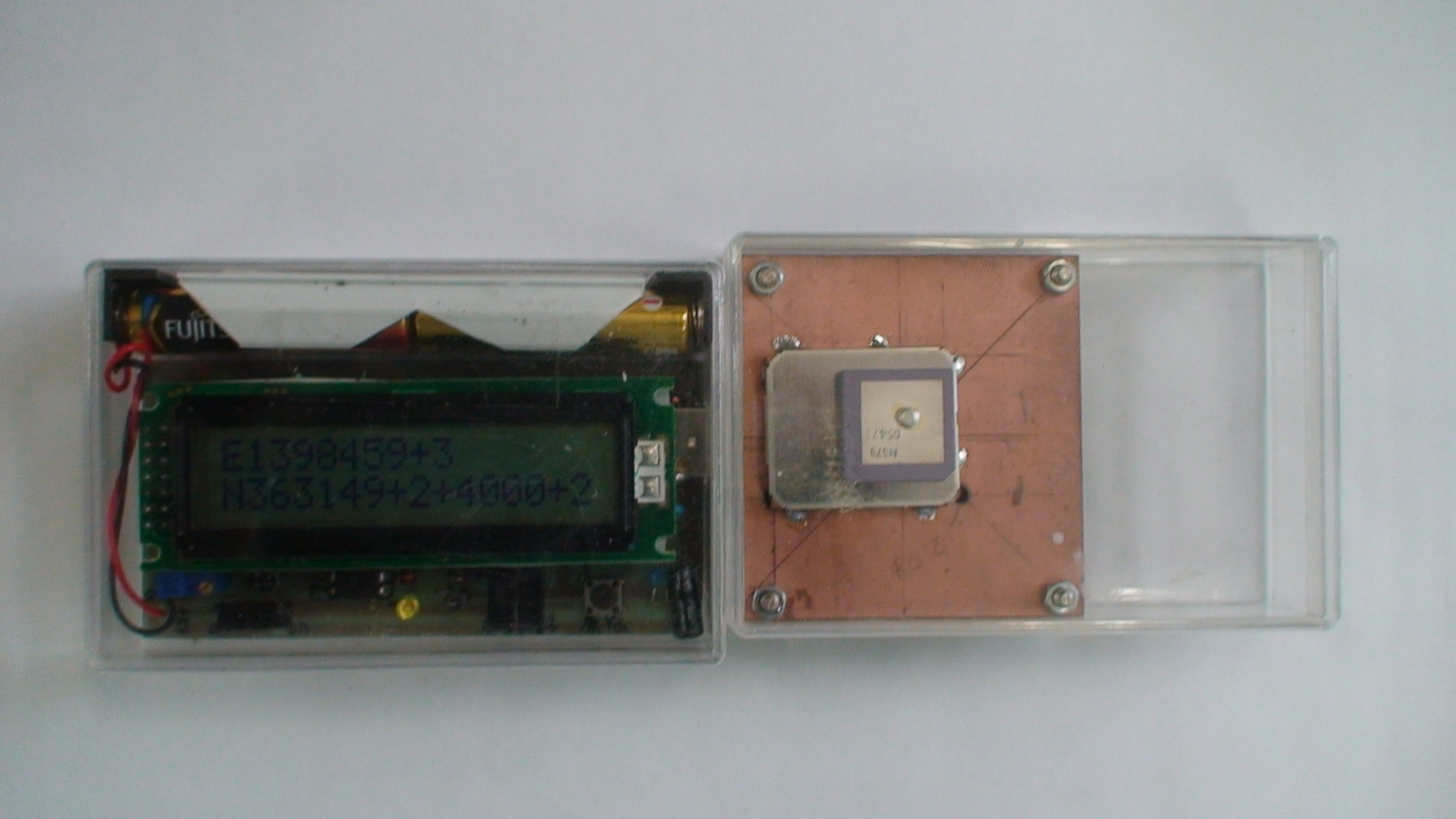
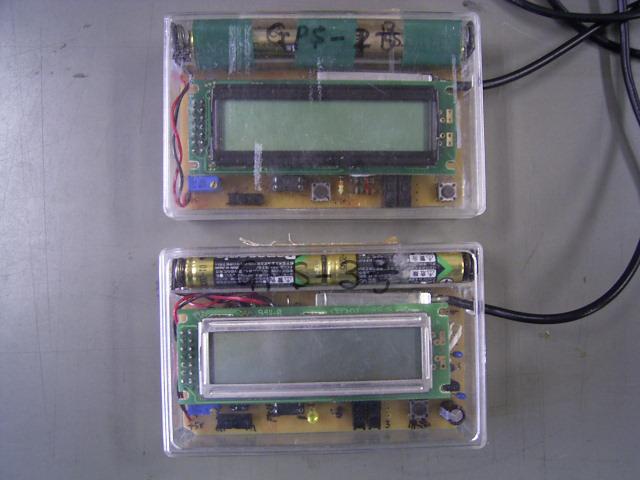
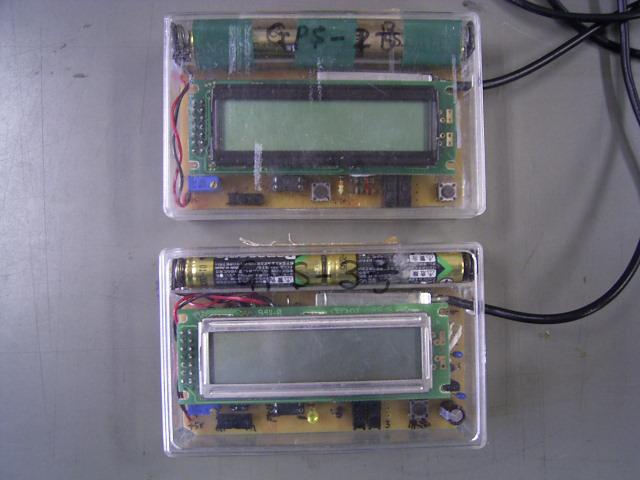
シリアル−USB変換専用ICであるFT232BMを使用すれば、シリアル−USB変換ケーブルが不要なシステムになると考え、改変した回路も作成しました。正常に動作しました。使用しているGPS−52に慣れ親しむと共に、その仕様書の内容を理解してくると、今まで著者がGeminiで製作してきている半自作GPS装置から、Geminiを取り外し、このGPS−52で置き換えできることに気がつきました。今回GPS−52版半自作GPS装置を紹介します。写真がそれである。GPS−8号と呼称します。左側のスチロールケースに入っているのはほぼGPS−3号からGeminiを取り外したもの。右側のスチロールケースにはGPS−52が入っています。Geminiでは受信機とアンテナが分離していましたが、使用できたGPS−52は一体型でした。今のところ、写真のような接続形状となっていますが、配置は適当に変更できるでしょう
GPS−8号の使用方法、データ表示、動作状況などはGPS−3号と全く同じです。GeminiとGPS−52とでは入手力データフォーマットは共にNMEAで一応同じようです。が、入出力センテンス、データ並びなどに相違が見られます。Gemini用に書き上げたアセンブラプログラムをGPS−52用に変更して制御用マイコンであるPICに書き込んでいます。
詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
61.経路長・面積計測器−その4
61. Измерительные приборы длины маршрута и площади - Часть 4
登録日 2008年 5月12日
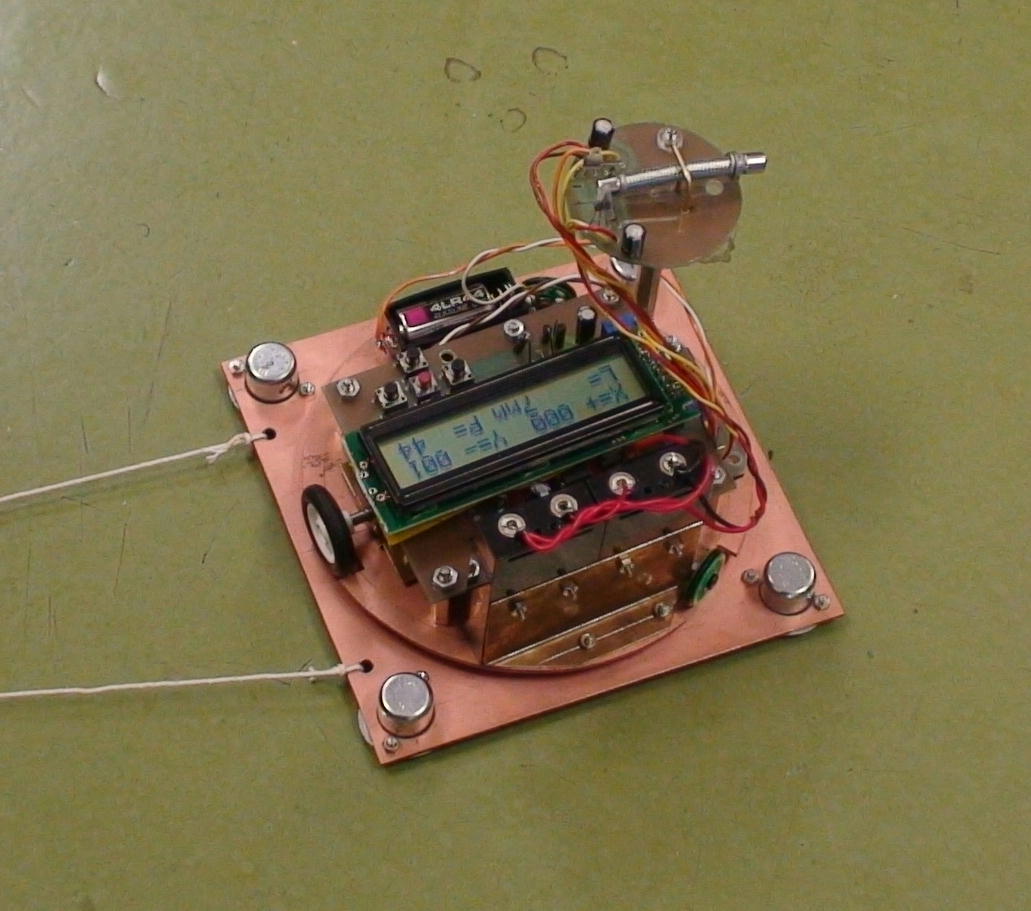
既報の経路長・面積計測器と方位絶対指向装置を合体させました。写真がそれです。経路長・面積計測器が方位絶対指向装置に搭載された形となっています。合体したこれらの装置は、移動体の上に乗っています。簡単に取り付けた紐で、移動体を平面上の経路を引きずり回します。移動体がどのように回転しても、問題なく計測が行われます。
自身の位置などを、自身で獲得できるので、応用面としては、室内掃除ロボット、自動移動ロボットなどに適用できそうです。
この試作品では、平らな平面上での計測が可能ですが、制作中、凸凹面にも対応できる方法に気がつきました。詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
訂正 57’.方位絶対指向装置のアセンブラプログラムの入れ替え
Коррекция 57'. Замена программы ассемблер для ориентации абсолютного направленного устройства
登録日 2008年 3月 19日
********** 訂正案内 ***********
ダウンロード用に提供していたアセンブラプログラムが、他の装置のもの(磁気浮上のもの)となっていることに 気がつきました(2008年3月19日)。今日差し替えました。57を見て下さい。 ***************************
60.アセンブラASM30で書き上げたdsPIC用実数・関数演算ルーチン−その2
60. Реальное количество и функции арифметические процедуры для dsPIC написаны в ассемблере ASM30 - Часть 2
登録日 2007年12月27日
dsPICのアセンブラASM30で、実数・関数演算ルーチンの開発の続報です。既報では、ASM60の 特長を生かすことなく、移植の容易さから、PIC18用のアセンブラMPASMのアルゴリズムをそのまま適用して 開発していました。
今回、ASM30を生かしたアルゴリズとして、前回のプログラムを大幅に変更修正して、実数・関数演算ルーチンを 書きました。
実数データ構造などに大幅な相違があります。が、論文を読めば直ぐに理解できると思います。前回のプログラムとの比較では、計算精度はほぼ変わらず、必要なレジスタメモリは大幅減、プログラムメモリ量では約3割減。実行速度では約4倍速い。計算速度が4倍も速くなっている点は魅力ではないでしょうか。クロック周波数が80MHz下でのものす。120MHzとすれば、計算速度は6倍速くなるでしょう。
既報プログラムと同じように、読者のアセンブラプログラム(当然ASM30の)に本プログラムを貼り付ければ、 読者のプログラムで実数・関数演算を容易に実行することが出来ます。プログラムの内容、使用方法、移植の仕方など 詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
59.dsPICの基礎(学生作)
59. Основы dsPIC (студенческая работа)
登録日 2007年11月11日
学生の解説文「Microchip社からリリースされている16bitデジタルシグナルコントローラー dsPICで動作する基本プログラムをアセンブラで書き上げました。動作に使用したdsPICはdsPIC30F3013です。基本プログラムの内容は、LED点滅プログラム、A/D変換プログラム、EEPROM読み書きプログラム、UARTによる送受信プログラムです。 本書には、開発環境の準備からdsPICを動作させるまでの手順も記載してあります。これからアセンブラでdsPICを動かしてみようという方がいたら、参考にしてみてください。」
注釈 本論文は、学生実験の1課題として、1学生に課した課題でした。dsPICの応用プログラムはほとんどC−コンパイラで書き上げたものしかありません。高価なC−コンパイラが無くても、アセンブラASM30で綺麗すっきりと、 プログラムが書ければ、結構なことです。そのためには、基本動作するアセンブラプログラムの応用例が提示されることが一番と思っています。ASM30で書きたい読者の参考として、提出された学生実験レポートを少し遅くなりましたが、 公開提供します。今後更に、応用プログラムを作成させるかどうかは、現時点では考えていません。詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます。
圧縮ファイルをダウンロードする
58.アセンブラASM30で書き上げたdsPIC用実数・関数演算ルーチン
58. Реальные процедуры расчета числа и функций для DSPIC, написанные в ассемблере ASM30
登録日 2007年11月 5日
dsPICのアセンブラASM30で、実数・関数演算ルーチンを書き上げました。著者は既に、PIC18用の同様の演算ルーチンを書き上げ、PIC18中で、必要な実数、関数演算部分にそれを使用してきていました。マクロチップ社が高品種のdsPICを発売したことは知っていました。当初、DSPに特化されたPICなのかと思っていましたが、 よく調べてみると、DSPエンジンは搭載していますが、PIC18を凌駕している高品種であることに気が付きました。今後のことを考え、dsPICで動作するアセンブラ仕様の実数・関数演算ルーチンを、PIC18用から移植することができました。dsPIC4013を使用しています。プログラムはMPASMからASM30に変更になりますが、極力余計な変更をしないで、素直に移植することにしました。そのため折角のdsPICの高性能機能を生かせない点がありますが、今のところは良いとしておきましょう。dsPICの特徴を取り入れ、提供しているプログラムを再編集するかどうかは、考慮中です。
と言うのはそれをやるには、PIC18でのアルゴリズムを大幅に変更うしなければならないからです。PIC18は8ビットマシーン、dsPICは16ビットマシーンなので。時間をかけてやっても、数倍程度の速さしか得られないようですから。
提供しているアセンブラプログラムは、編集中に使用した写真の自作電卓中では、正常に動作しています。プログラムは極力サブルーチン化していますので、必要な関数だけを残すようにすることもできます。自作電卓を駆動するために、全プログラムの半分近くがその命令で占められています。この部分を削除し、必要な実数・関数ルーチンだけを用いれば、プログラム容量に小さいdsPICでも駆動できるでしょう。
詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
57.方位絶対指向装置
57. Устройство абсолютного направления ориентации
登録日 2007年 7月 28日
********** 訂正案内 ***********
ダウンロード用に提供していたアセンブラプログラムが、他の装置のもの(磁気浮上のもの)となっていることに 気がつきました(2008年3月19日)。今日差し替えました。 ***************************
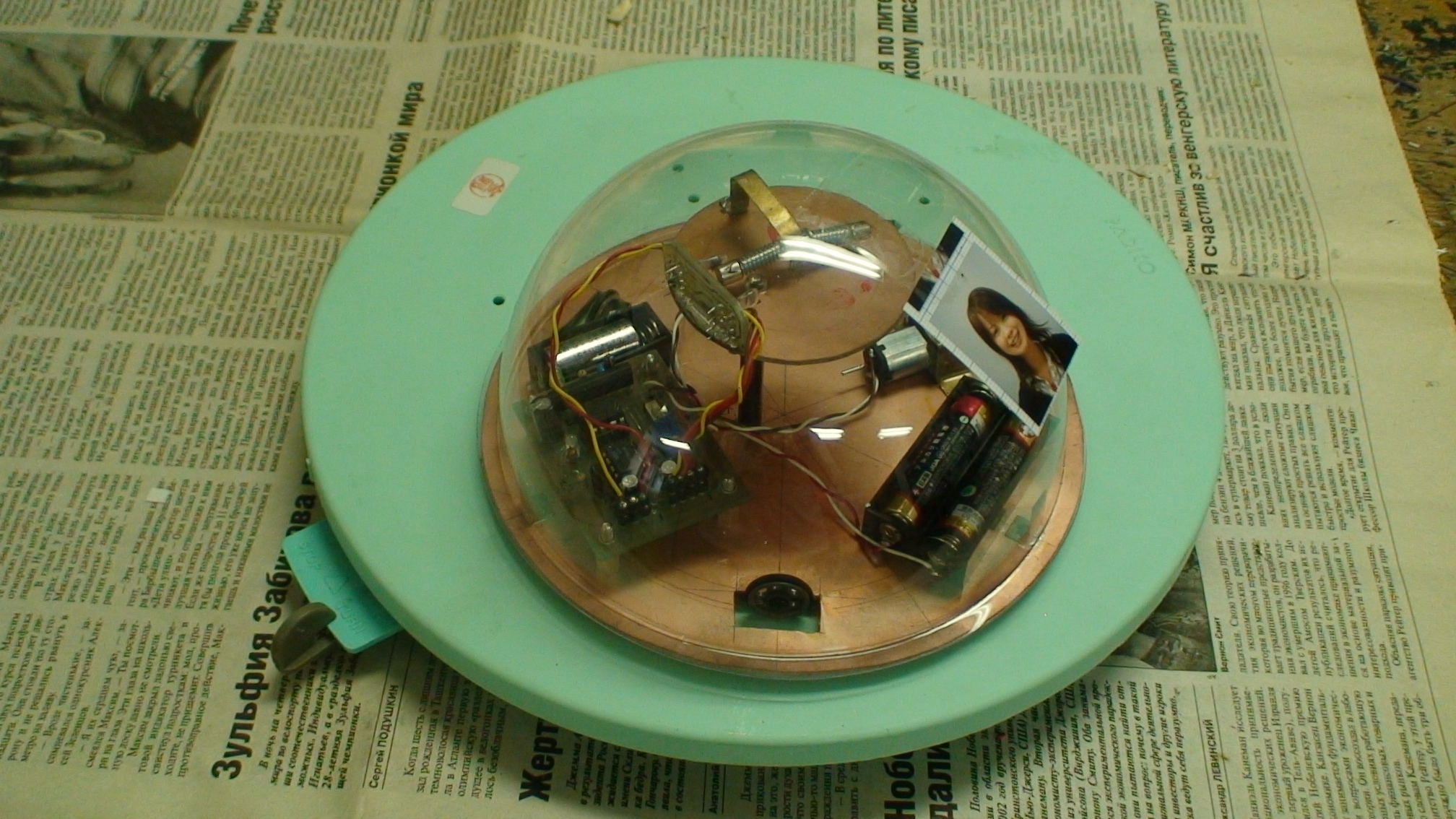
既報の距離・面積計を車などの移動物体に搭載し、移動物体の位置座標、距離等の量を確定してみたい。が、車は左右に方向変更をする。つまり、回転動作をする。しかし、既報の距離・面積計は回転動作には対応していない。 どうしたらよいのか考えてみた。車に搭載した距離・面積計が、距離・面積計の初期設定方向を常に指向して、車が方向転向しても、初期設定方向を向き続けていれば、良さそうである。そのため、表題の装置を試作してみた。写真にその外観を示している。プラスチック製のろくろ回転台にのっている透明な半球状の装置がそれである。デモ用に、女の子の写真が張り付いている。この状態で、装置にスイッチを入れる。ろくろを左右に適当に回転する。とすると、女の子の写真は他の方向を向くようになるはずであるが、この装置はろくろ台が回転すると自動的に対応回転動作を行う。つまり、台をどの様に回転させても、女の子の写真は初期に設定した方向を向き続ける。という装置である。車にこの装置を搭載し、更に、この装置に、既報の距離・面積計を取り付ければ、車がどの様に方向変更しても、距離・面積計は回転運動はしないことになる。と考えている。
装置の核心は自作の方位磁石にある。詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
56.光学マウスキットを応用した”卓上型”経路長・面積計測器−その3
56. "Настольный" прибор измерения длина маршрута и площади с помощью оптического комплекта мыши - Часть 3
登録日 2007年 7月 27日
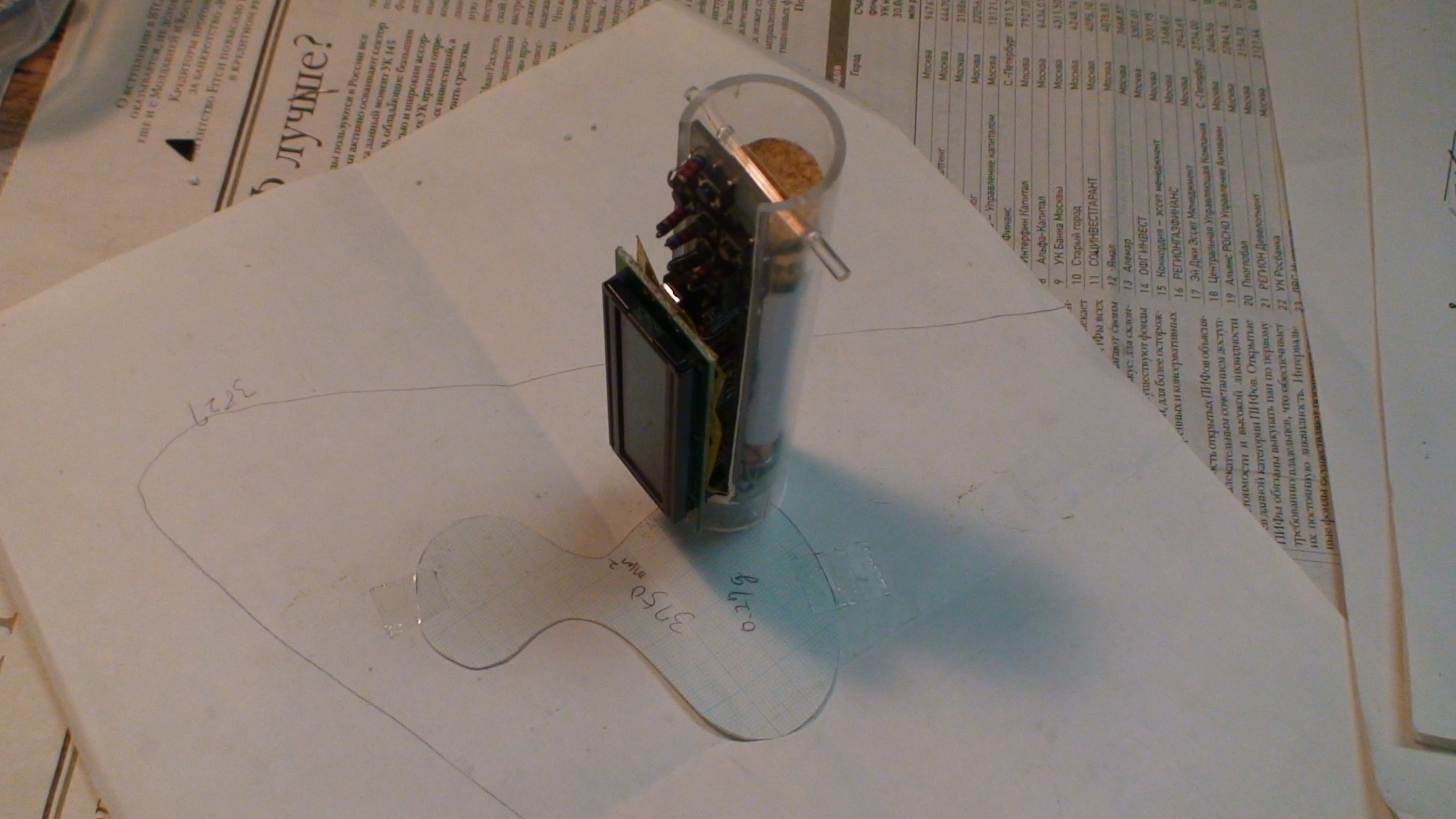
表題の装置を片手で操作できるようにしてみました。2種類作成しましたが、その1つを写真で示しています。 円筒のアクリルパイプ中に回路、電池を納めています。光学センサ部は、そのままでは、パイプ中に納まらないので、 パイプ中に納まるように変更加工しました。表示LCDは残念ながら、パイプに納まらないので、写真で見てとれるようにパイプ側面に配置しました。
片手で操作できるのは良いのですが、結果としては、計測のし易さは前回の方が良さそうです。
詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
55.光学マウスキットを応用した”卓上型”経路長・面積計測器−その2
55. "Настольный" прибор измерения длина маршрута и площади с помощью оптического комплекта мыши - Часть 2
登録日 2007年 7月 3日
表題の計測器を縮尺図形でも適用できるように改良しました。C−LCD画面にメニュー画面を 表示することが出来ます。クロスキーを使用して、縮尺スケール数値、単位系などを 決定していきます。計測した経路長、面積値等がLCD画面に表示されるのは前回と同じですが、 今回の装置では、スケール変換、単位変換を行っていますので、縮尺値にかかわらず、「実数値、実単位」で LCD画面にデータが表示されます。例えば、縮尺地図で10cmが100kmであれば、メニュー画面で、その様に設定します。そうすると測定で、計測器が地図上で30cmの経路長を進んだとすれば、LCD画面には300kmが表示されます。面積等でも同様な処理を行わせています。
計測器はデフォルトモードでは縮尺していない図形を対象とさせていますので、前回の装置と同じ処理を行います。
前回の装置に対しての、した方が良いであろうハード回路の変更点を述べます。光学ICに接続させている LEDの−端子をICの端子から切り離し、数十Ω〜数百Ωの抵抗を接続して、この抵抗の残りの端子をアースとして下さい。これにより、LEDはICによる自動点滅から切り離されますので、常時点灯となります。光学マウスとしての使用時は、動きがなければ、LEDを自動的に消灯させるのは省エネルギーモードで結構なのですが、計測での使用では、 LEDの自動点滅は邪魔なようですし、測定精度の低下ももたらしているようです。
詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
54.光学マウスキットを
応用した”卓上型”経路長・面積計測器
54. "Настольный" прибор измерения длина маршрута и площади с помощью оптического комплекта мыши
登録日 2007年 6月21日
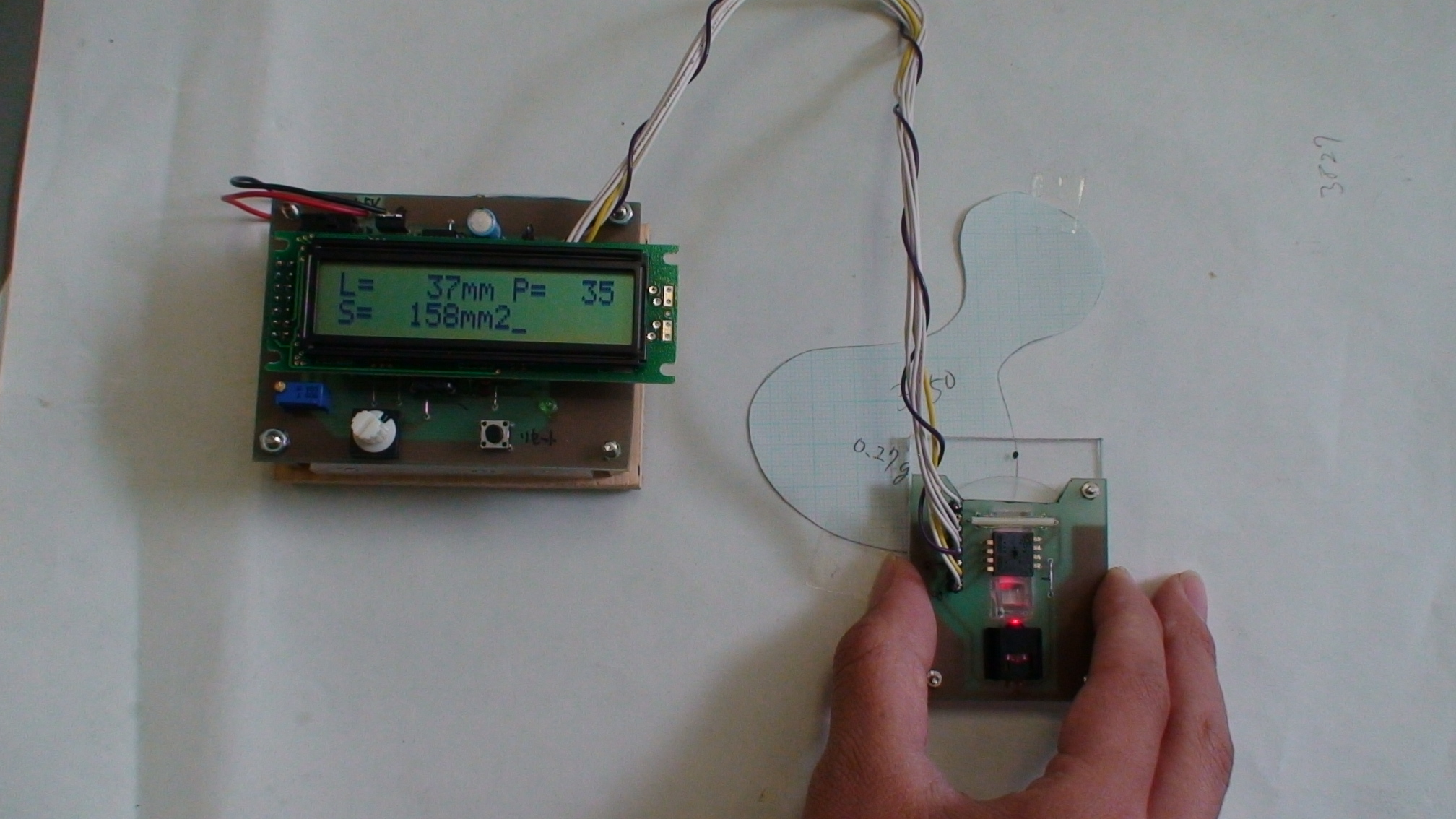
光学マウスキットを転用して、図面上での経路長、閉曲面の面積を計測できる測定器を製作しました。 写真が計測中の様子です。ひょうたん型の図形を手で持っている移動部でなぞって行くと、左側の表示部に 移動全経路長、経路が閉じていれば、その面積値を表示します。
光学マウスキットの主部品である光学ICセンサ(DSPの機能も有している)はLEDで照らされた図面 などを2次元画像として取り込み、ICの移動とともに、画像の移動量を出力してくれます。これを 制御用PICで取り込み、様々な処理を施して、C−LCDにデータを表示させています。
PICに書き込んだアセンブラプログラム中で、経路長計算のため、ピタゴラスの定理の計算、平方根の計算、 面積の計算のため、ヘロンの公式の計算を行っています。 これには著者の開発した実数・関数計算ルーチンを適用しています。 測定精度は、測定に馴れれば数%以内に納まります。場合には0%となるときもあります。
応用例としては、地図ならば、2地点間の経路長など、市町村などの面積の算出、 建築関係の図面ならば、池や庭の面積などが簡単に算出できるでしょう。が、この装置は、 100mm移動すれば、LCD画面には100mmが表示されます。現在、縮尺などを 考慮した測定器に向けて改良し終わりました。この第2号は遅くないうちに公開します。
他の応用例として、室内ロボット等に搭載し、床面をモニタさせる(床に何らのマーカー類も必要としません)ことで、 完全自立方式で自分の絶対座標を獲得できそうです。その他の応用例を現在考慮中です。 詳細は論文等をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
53.音声帯域FFTシステム−2号
53. Голосовая полоса FFT Система-2
登録日 2007年 6月 6日
2つの素子の比較
18F252 18F2525
プログラムメモリ 48kバイト 32kバイト
SRAMデータメモリ 3968バイト 1536バイト
EEPROMデータメモリ 1024バイト 256バイト
(1)2つの素子は互換性があるといっても252で書き上げたアセンブラプログラムがそのまま2525で正常に 走るわけではない。252と2525にはアセンブラに若干の相違がある。注意必要
(2)データメモリが大きくなったので、浮動小数点の仮数の有効桁を8桁に戻した。
(3)2525を「PICSTART Plus」で書き込むとき、若干の注意が必要である。2525の書き込み時に於いて素子の書き込み時の電源端子にコンデンサをかませておく必要がある。IPIから素子を入手すれば、 処方が入手できる。
(4)252から2525に変更したところで、性能が良くなったわけではない。浮動小数点の取扱がすっきりした点だけ位か。が、その分、将来における開発、改良がし易くなっていよう。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
52.GPS4号の計測軌跡を地図上に描画する方法(学生作)
52. Как нарисовать траекторию измерения GPS4 на карте (студенческая работа)
登録日 2007年 5月24日
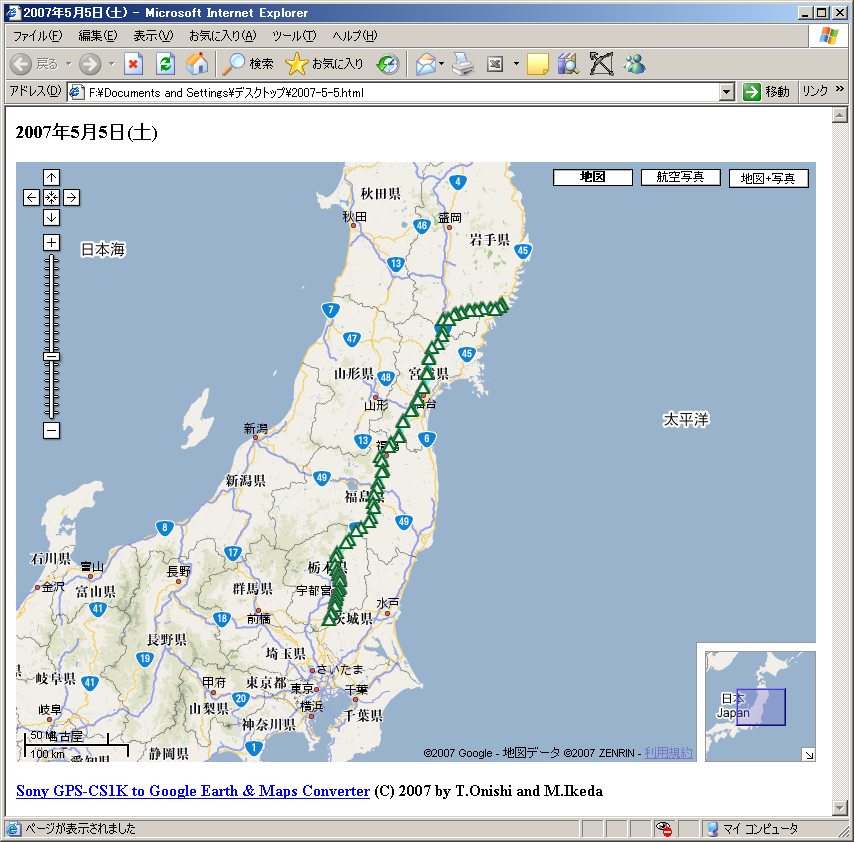
先に紹介している半自作GPSシリーズの4号では、測定したデータをパソコンに取り込み、測定データをCRT画面に表示ができるようになっています。しかし、測定地点の相対的な位置関係はわかるものの、地図を表示していなかったため、測定地点がどこを示しているのかわかりませんでした。 今回は、GPS4号で測定したデータを地図と一緒に描画する方法を紹介します。地図データは, 検索サイトGoogleが無料で提供する地図検索サービスであるGoogle Mapsを使用しています。今回紹介する方法を使えば、自分がどこを歩いてきたのか、或いはどの様な道を通過してきたのか、等が詳細にわかるようになります。
紹介している画面は、栃木県小山と岩手県大船渡市を自動車で往復したとき、GPS−4号で計測したデータを ここで紹介するプログラム類でGoogleの地図上に重複させたものです。拡大縮小は 自在に行えます。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
51.PICを使用した音声帯域FFTシステムの製作
51. Производство аудио-диапазона FFT системы с использованием PIC
登録日 2007年 4月26日
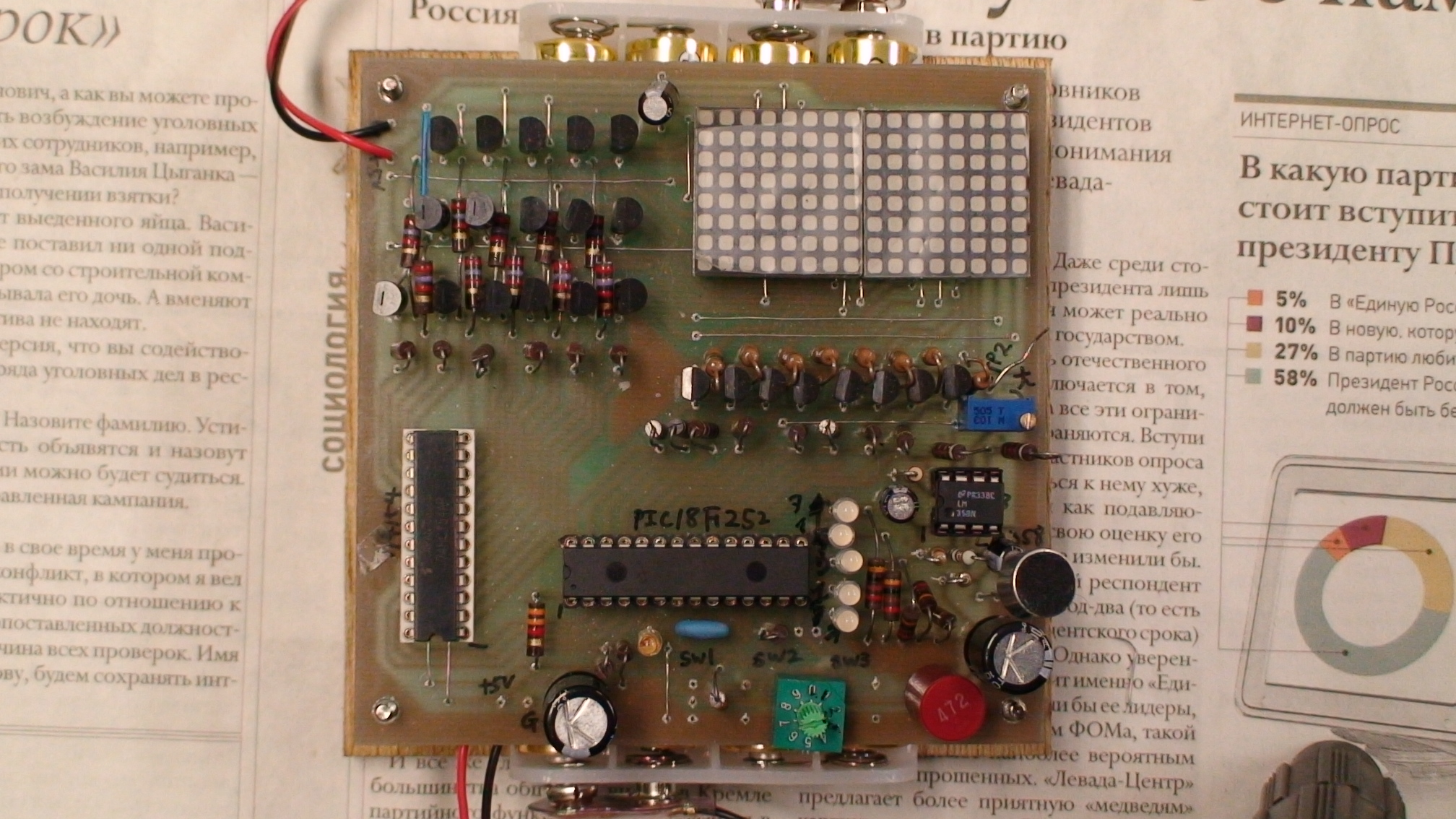
私の研究室の卒業生の作品を参考にして、処理周波数が音声帯域のFFT(高速フーリエ変換)システムをPIC18F252を使用して構築しました。写真がその外観です。フォートランで書かれたプログラムをアセンブラで書き直しました。演算は整数型・固定小数点型ではなく、既に著者が開発しているPIC18用浮動小数点型を応用しています。固定小数点型と比較すると、やはり処理に数倍以上の時間がかかっています。
結果は16ビット×8ビットLEDマトリックスに、横軸に周波数、縦軸にパワー強度を対数スケールで表示されます。サンプリング点数は、スイッチで128点、64点、32点が選択できます。
バグ取りに結構時間がかかってしまいました。フォートランプログラムのシュミレーション結果と異なって出力される点が若干あるのが気にかかりますが。プログラム内にバグがありそうな気がしますが、発振器からのサイン波を入力させたときの結果は、予想通りの周波数分析結果を綺麗に表示しますので、気になる点を抑えて公開することにしました。
固定小数点型より、性能が劣りますが、プログラムは分かり易く、従って拡張は容易であり、将来的により高速のPICが供給されたときには役に立つのではないでしょうか。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
50.GPS−6号
50. GPS-6
登録日 2006年 6月17日
自作GPSを公開していますが、最近、使用している受信器Gemini(SPA社販売)が販売終了となったことを知りました。 生産元の日本無線が生産を終了したようです。
Geminiの姉妹品とした受信器CCA−453JPは継続して販売しています。
CCAはGeminiとハード的には全く等価です。が、処理データ形式が全く異なります。 GeminiはASCIIコード仕様、CCAはバイナリコード仕様です。
ハード回路はGPS−3号をそのままに、受信器だけGeminiからCCAに置き換え、制御CPUであるPICに書き込むアセンブラプログラムを、 Gemini用からCCA用に変更修正し、書き上げました。圧縮ファイルとして添付しています。
出来上がったGPS−6号は動作は確認しています。なを、6号の外見は全くGPS−3号と同じなので、 GPS−3号の写真(上が2号、下が3号)を借用しています。
CCAの価格は15000円弱で、Geminiより割り高となっています。
論文では、JRCフォーマット仕様というCCAで使用される入出力データ仕様に関して、 アセンブラプログラムの構築に際して、使用したデータ変換過程・手順が解説しています。 詳細を知りたければ、論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
49.命令語で動作する車型ロボット
49. автомобильообразный робот, который работает в инструкции условия
登録日 2006年 6月2日
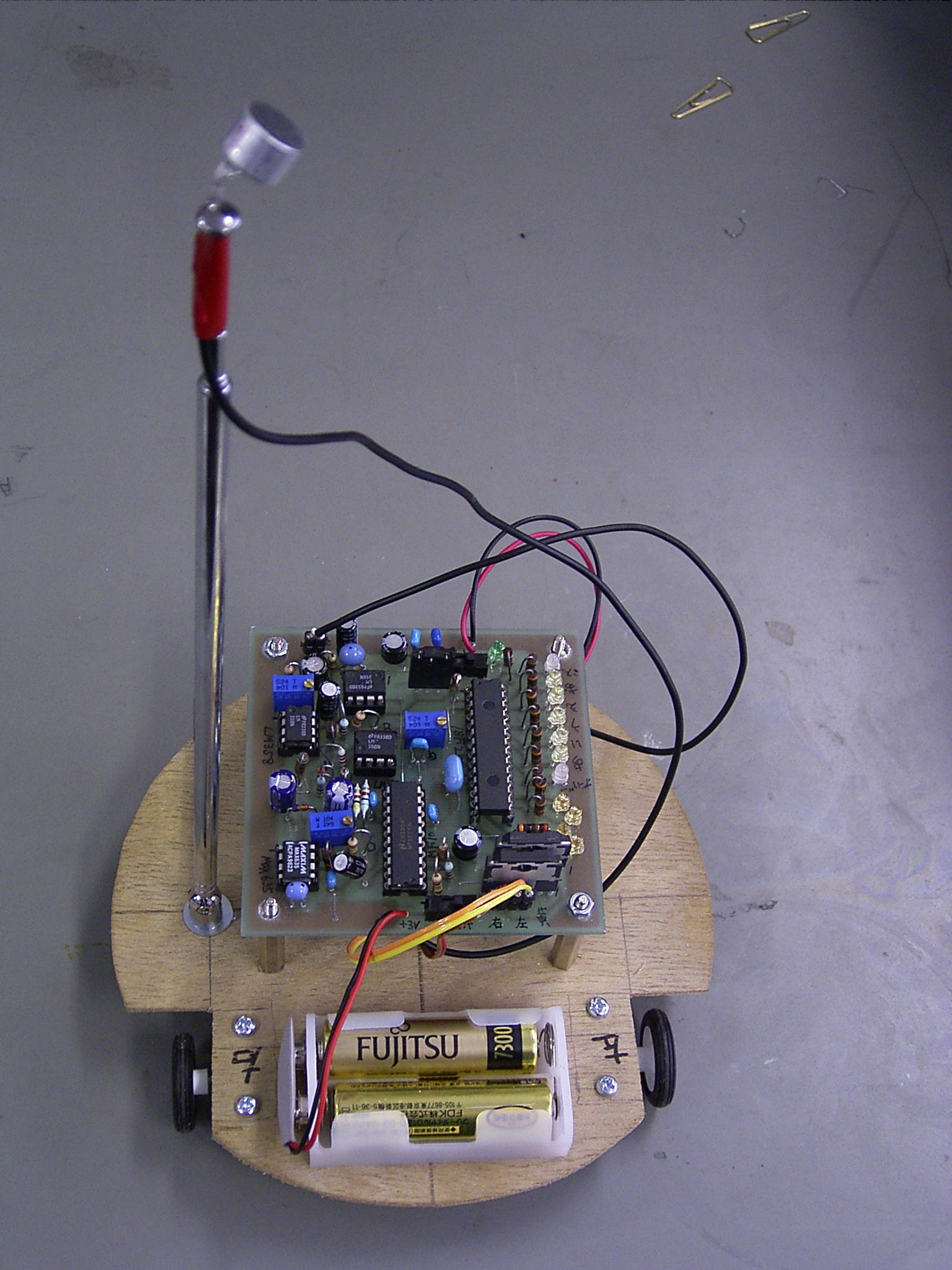
今回、6号システムを拡張し、制御者(著者)の口から発する幾つかの命令語で動作制御できるデモ用小型ロボットを製作した。写真がその外観である。ロボットは3輪車型自走ロボットである。
大きさは円形の基台の直径が約14cm。前輪の2つの車輪はギア付きマイクロモーターで個別に駆動される。
後尾にある尾輪は自在型である。車体に立てたアンテナ棒の先にコンデンサマイクが取り付けてある。
マイクに向かって「進め」、「止まれ」、「左」、「後」、「右へ」などの命令を発すると、ロボットはこれらの命令を解読し、それに従った動作をする。偶には、受け付けない場合や、違った動作をする場合もあるが、一応愛嬌である。命令語の解読のアルゴリズムは至って単純である。それは論文に任せよう。
6号の論文、本論文を精読し、改良に努めれば、判断性能を格段に向上できるでしょう。
また、本システムを理解すれば、多種多様な命令語でも動作させることも出来よう。「歌え」「笑え」などは造作もないことである。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
48.音声識別 −6号− −新たな識別方法の採用−
48. Идентификация речи -6 - -Принятие новых методов идентификации -
登録日 2006年 4月15日
簡易な電子回路での音声認識システムの構築を試みている。5号までは、入力音声がどの母音なのかを判断する方法として、得られた周波数スペクトル強度分布に、最小2乗法を適用していた。
判断精度の向上を目指し、今回、入力音声を周波数分析して得られるスペクトル強度分布に対して、最小2乗法ではなく、強度分布の相対関係から判断を下す方法を試みることにした。この方法を前者の最小2乗法に対して、ここでは強度相関法と呼称する。この強度相関法では、5号までのシステムと違い、予め母音の周波数分析データをメモリに記憶させる必要がない。その分、使い易くはなっている。が、その代わり、予め被験者の各母音のスペクトルの強度相関関係を調べ、それに基づいた判断アルゴリズムをアセンブラプログラム中で書き上げておく必要がある。
6号の結果であるが、判断アルゴリズムを被験者毎に構築する必要があるが、判断アルゴリズムを十分に練って構築し、誤答をするならばその点に改良を加えていく。これを繰り返していけば、 誤答率は限りなくゼロに持って行けそうである。
回路も5号と比較すると、大分簡単化もされている。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
47.音声識別 −5号−
47. Идентификация голоса -5-
登録日 2006年 3月24日
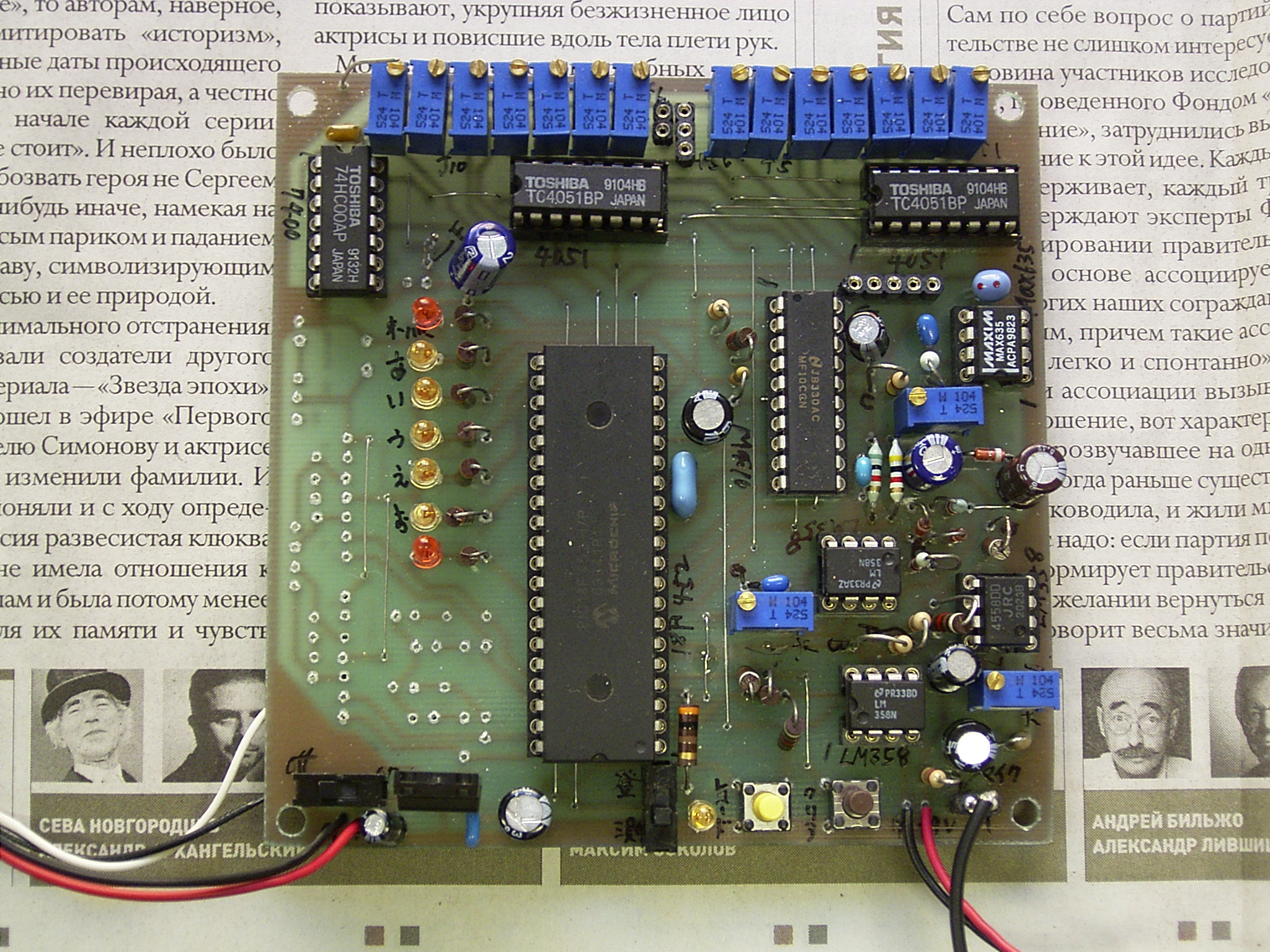
音声母音を識別するシステムの制作を試みている(1)、(2)。識別性能、即ち誤答率の低下を追求してきた。また、将来的には同様のシステムで子音までの識別を考えてもいる。今回、拡張性、及び応用性のあるシステムの改良型を試作した。以下での説明のために今回紹介するシステムを5号と呼称する。以下でこれについて報告する。
なを、1号の紹介論文中の回路図において、交流−直流変換回路部分で抵抗の接続位置に訂正忘れによる間違いがあった。回路は正常に動作はしていたが、回路図の記述ミスに気がつかなかったのである。4号、5号の回路図では該当箇所を訂正している。
音声のサンプリング周波数帯域の増加が、やはり識別の誤答率の低減に直結すると判断し、サンプリング周波数帯域をf1〜f10(150Hz,300Hz,450Hz,600Hz,750Hz,1.0kHz,1.5kHz,2.0kHz,2.5kHz、3.0kHz)の10帯域から、f1〜f14(150Hz,300Hz,450Hz,600Hz,750Hz,950Hz,1050Hz,1.2kHz,1.5kHz,1.8kHz,2.1kHz,2.4kHz、2.7kHz、3.0kHz)の14帯域と増加させた。これに伴い、BPFであるMF10に供給するクロックパルス源の回路の変更も行った。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
46.音声識別 −母音あ、い、う、え、お その4−
46. Идентификация голоса - Vowels, А、И, U, Э, О, Часть 4-
登録日 2006年 2月11日
既報システムでは周波数分析は5帯域でしたが、4号では10帯域としました。それに伴い、 若干の回路の改良、その他を行いました。少しは誤答率が小さくなったと思っています。
既報の論文の回路図に間違いがありました。交流−直流変換部分です。完成した回路は 正常に動作していました。回路図の記述ミスでした。4号では該当箇所を訂正しています。
まだまだ実用的ではありませんが、改良の余地は充分にあり、正答率の向上は望めそうです。 当方では更なる改良に取り組んでいます。
既報システムから飛んで4号となっている理由については、論文を読んで下さい。 詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
45.音声識別 −母音あ、い、う、え、お−
45. Идентификация голоса - Vowels, А、И, U, Э, О-
登録日 2005年 12月30日
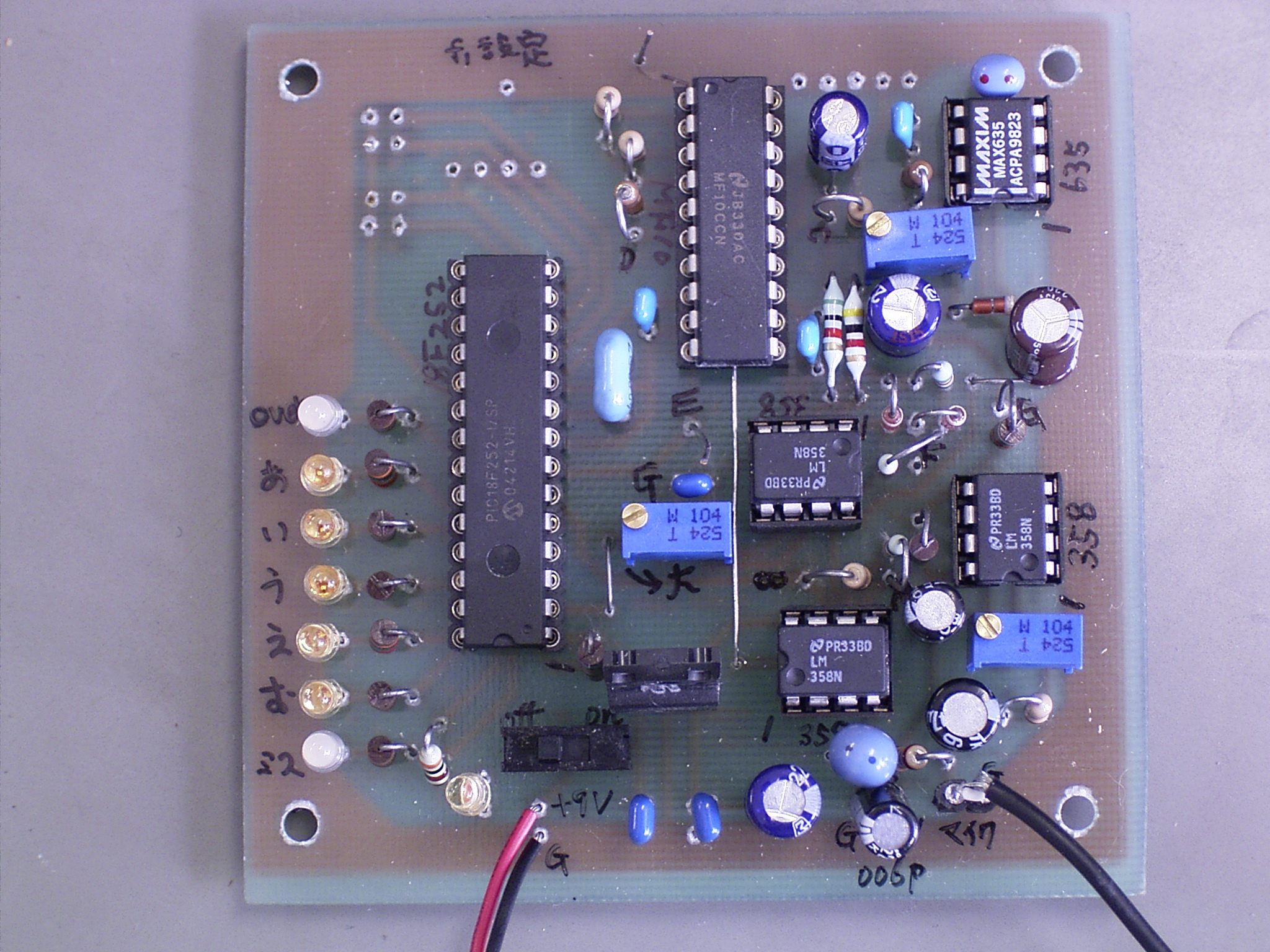
ロボットなどを自前の声で動かせたらば面白いですね。今回、簡易な、人の母音の識別システム回路を 試作してみました。大きさは手の平程度です。
前もって、本装置のマイクに向かって発声し、自分の母音を5つ登録しておきます。 登録が済んだら、スイッチを切り替えて、適当に各種の母音をマイクに向かって発声します。 取り込んだ母音を既登録の母音データと比較し、判断し、結果を各母音に対応させた5つのLEDの 内の一つを点灯させることで結果を知らせてくれます。
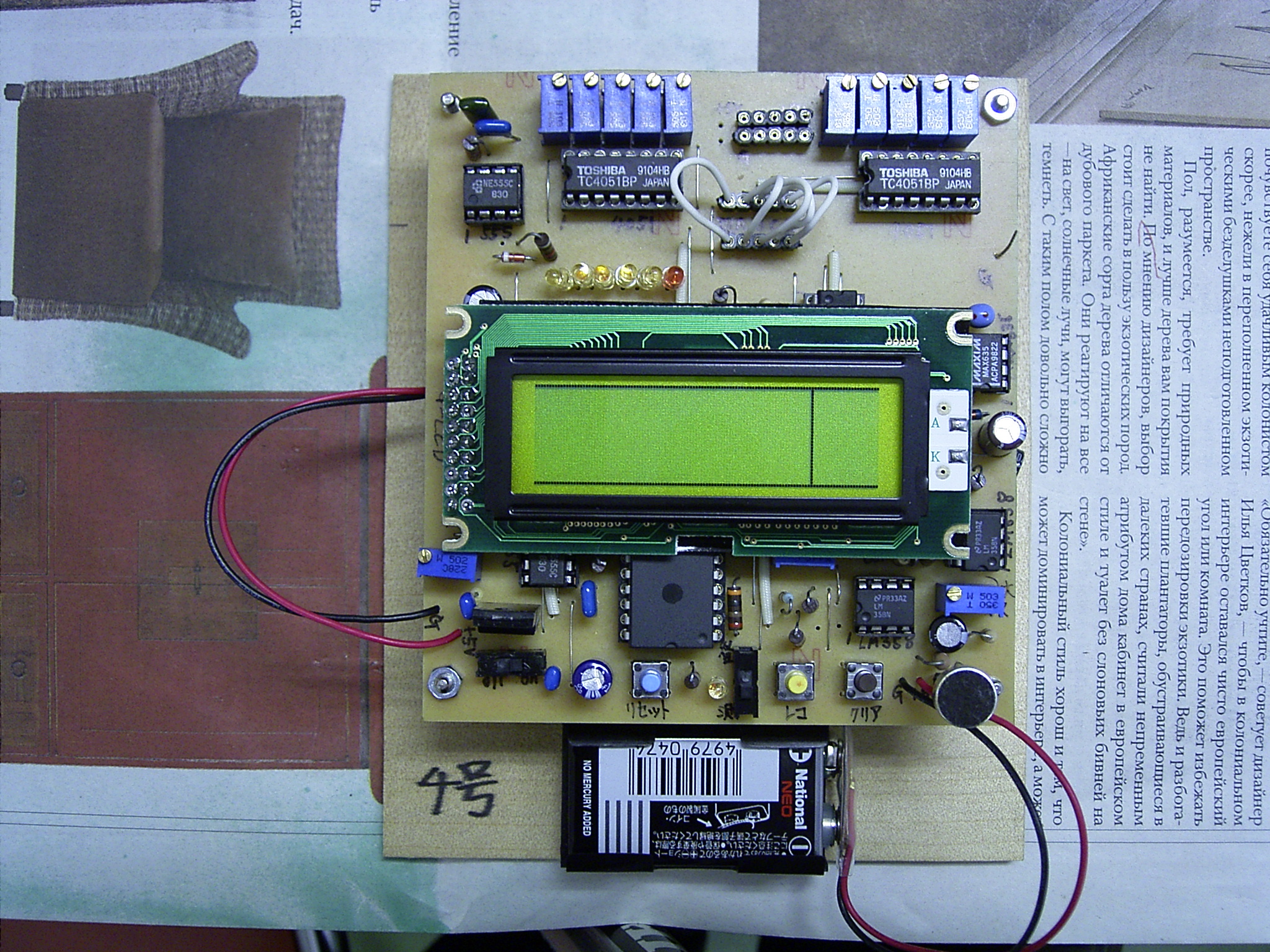
SCFであるMF10を使用し、音声を幾つかの周波数帯域で周波数分析する方法を採用しています。 写真に示しているように、G−LCDにも各周波数におけるスペクトラム・アナライザの結果も表示しています。 使用に熟れれば、G−LCDは不要となり、回路はもっと簡単にもなります。 現時点での正答率は注意して使用すれば、90%以上です。まだまだ実用的ではありませんが、 改良の余地は充分にあり、正答率の向上は望めそうです。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
44.移動電話を利用した遠隔制御及びデータ取得システム その2
44. Система дистанционного управления и получения данных с использованием мобильного телефона Часть 2
登録日 2005年 7月7日

既報の論文では、既報システムに使用できる移動電話は学内PHSでした。これではどうしても汎用性に欠けます。 今回、既報のシステムを、学内PHS電話だけではなく、一般の移動電話を使用しても、 正常に動作するシステムとしました。
PHS,携帯電話等の共通単語として「移動電話」を使用しましょう。 写真の左側の電話は移動局に取り付けた著者の携帯電話、右上の電話は固定局に取り付けた携帯電話です。 既報システムでは、両方の移動電話は学内PHSでした。提示しているシステムで、使用方法は 既報システムと同じくして、正常に遠隔制御及びデータの取得ができます。電話をPHSに変更しても 正常に動作します。つまり、電話の種類を問わず、どの様な移動電話でも、どの様な地域間でも 本システムは機能すると思っています。
電話の種類、地域、電話会社を問わずに使用できるシステムと思っています。基礎開発のシステムですが、 非常に安価な費用で、いろいろな応用が考えられると思います。
なを、既報システムでは、音声回路を経由してのDTMF信号の伝送は不調であることを、報告していました。 従って、本システムではその方法を放棄し、昔となりましたが、音響カップラー方式での データを音声パルス列で伝送する方式に立ち返っています。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
43.電話を利用した遠隔制御及びデータ取得システム
43. Система дистанционного управления и получения данных с использованием телефона
登録日 2005年 6月23日

PHS、携帯電話を用いた遠隔制御システムについては既報です。今回、移動局側で取得したデータを 固定局で取得できる機能を持たせたシステムを製作しました。一応遠隔制御機能も持たせています。 写真が完成試作のシステムの概容です。 右側が固定局、左側が移動局です。移動局にはGPSが装着されています。移動局はどこにあっても良いのですが、 GPS受信をしているので衛星の見晴らしがよいこと、電話を持っているので受信状況の良いところと、 使用範囲は限定されてしまいますが、それなりの使用方法ができるでしょう。
このシステムは両方に学内PHS電話を使用して開発しました。これらPHS電話を携帯電話に置き換えると、 正常に動作しません。その理由、それに対する対策などについては論文を読んで下さい。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム類をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
42.レーザーを使った3次元スキャナー(学生作)
42. 3D сканер с использованием лазера (студенческая работа)
登録日 2005年 6月23日
市販されている3次元スキャナーは高性能ですが、高価です。卒業研究課題として、分解能はまだまだですが、 安価で、構造も簡単な3次元スキャナーを作成しました。
測定対象物を回転台におきます。半導体レーザー光を対象物に照射し、それからの散乱光を受光し、対象物の回転中心からの表面距離を求めるという方式を採用しました。取り込んだデータから、CRT画面上に、対象物の 3次元描像を復元します。像は種々の加工ができます。
詳細は論文をダウンロードして読んで下さい。
(今の時点では、論文だけ提供しています)
論文をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
41.GPS−4−1号
41. GPS-4-1
登録日 2005年 3月28日
GPS−4号で測定したデータをパソコンで処理するため Visual Basicで書いたプログラムに 幾つかの機能を追加した新しいプログラムを書き上げました。GPS−4号で提供しているVisual Basic のプログラムをこの新規プログラムに置き換えることができます。追加した機能は以下の通りです。
(1)描写データグラフを、CRT画面上で自在に移動、拡大、縮小ができる。
(2)印刷出力も上記処理に対応させた形状で印刷することができる
(3)測定データは3次元データ(経度、緯度、標高或いは東西、北南、上下)なので、3次元データらしく、 空間描写ができることが望ましいので、一応その様な処理機能も用意した。
(4)使用方法はGPS−4号の場合と同じであり、メニュー方式を多用しているので、 画面を見ながら簡単に処理操作ができる。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
40.GPS−4号
40. GPS-4
登録日 2005年 2月 8日
半自作GPSについては、既報です。今回4号を製作しました。変更点は以下の通りです。
(1)外部シリアルEEPROMを装着させたので、大量の測定データを保存できます。
(2)パソコンで、測定データをGPS−4号から取り込み、測定データグラフをCRT画面に 表示し、かつグラフの印刷もできます。このソフトはVisual Basic(V.6)で書き上げました。
(3)3号まで使用していたC−LCDの代わりに、G−LCD(SG12232)を用いています。
(4)クロスキー方式を入力、制御のために採用しました。
測定データの保存、解析が自在にできるようにするため、現在、CRT画面でグラフの移動、拡大、縮小、同じく印刷も同様にできるよう、ソフトの改良を行っています。 詳細は論文をダウンロードして読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
39.G−LCD(SG12232)駆動
汎用PICアセンブラプログラム−その2
39. G-LCD (SG12232) привод
Общая цель PIC Assembler программа - Часть 2
登録日 2004年12月2日
G−LCD(SUNLIKE社 SG12232)駆動PIC汎用アセンブラプログラムに関しては 既報です。このアセンブラプログラムを、他に応用していて、1文字だけを表示するのに、 文字列表示のマクロ命令を使用するのでは不便であることに気がつきました。
1文字毎に、テーブルを用意するのでは、配慮が足りません。それで、1文字を描写する マクロ命令を付加しました。また、文字列を表示する位置を指定する座標値は、既報ではリテラル値だけ 指定できましたが、これだけでは使用に不便をきたすので、変数値でも指定できるマクロ命令も 用意しました。先に紹介したアセンブラを今回紹介しているものに置き換える (バージョンアップですか)ことをお勧めします。 詳細は論文をダウンロードして読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
38.PICとメニュー方式
38. СИСТЕМА PIC и меню
登録日 2004年12月2日
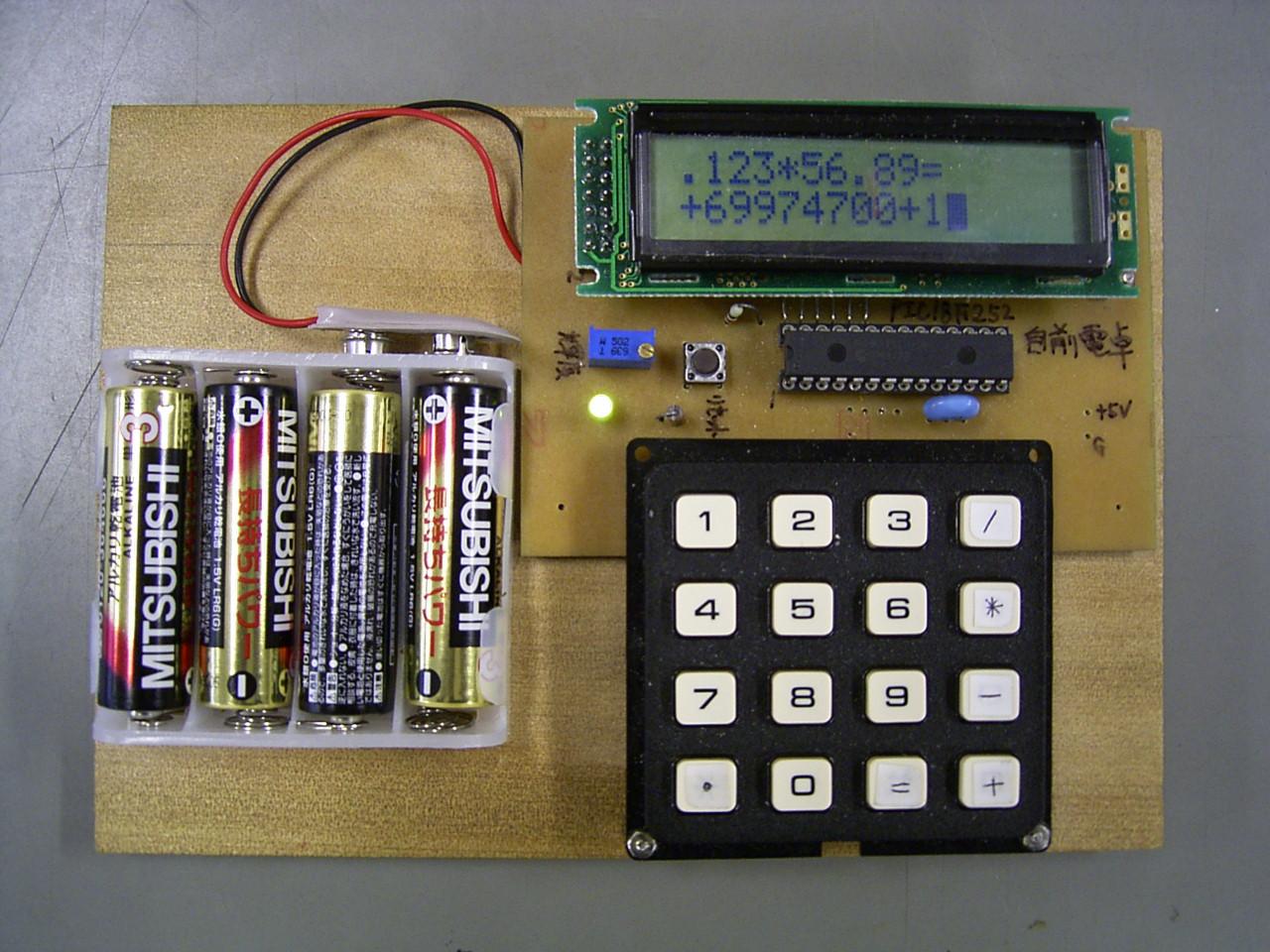
先に、PIC18F252を利用した自前電卓を紹介していました。 その回路では4行×4欄のキーパットで、数値やその他の制御キーコードを入力していました。 そのため、関数演算をする時、使用する関数が違う場合には、その度毎に プログラムの少しの変更とアセンブリング処理が必要となっていました。
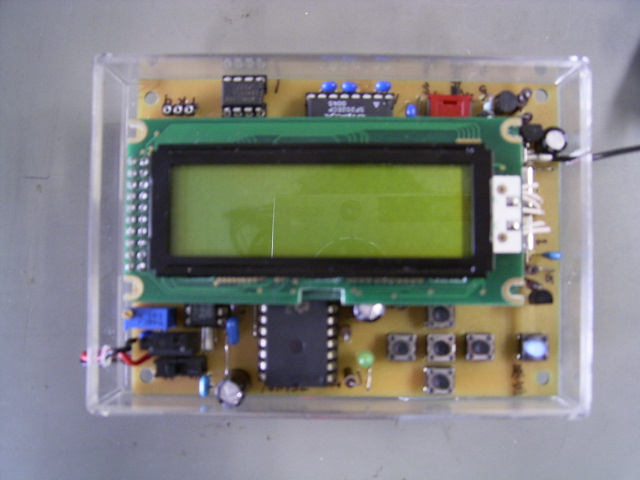
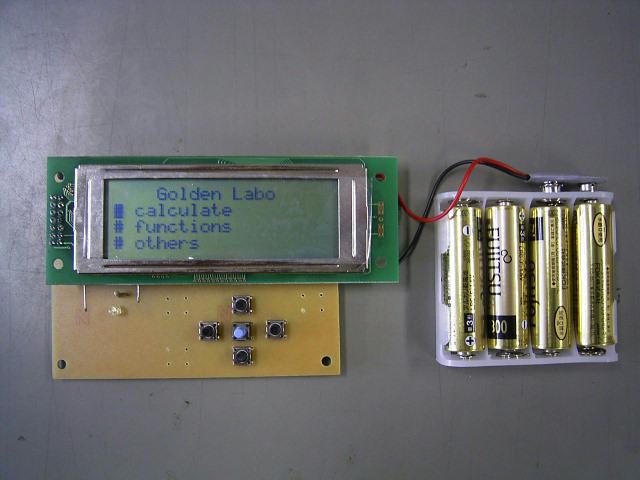
近年携帯電話などでは5つのスイッチからなるクロスキーで、多彩な処理ができるようになっていますね。 先の自前電卓にこのクロスキー方式を採用しました。写真が出来上がった回路です。画面を見ながらの処理方式なので、 非常に使い勝手が良くなっています。ここで公開しているメニュー方式では、PICで実数・関数演算 だけを実行できるだけですが、必要なメニューを設定すれば、少ないキーで多彩な処理を 行うことができるでしょう。
詳細は論文をダウンロードして読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
37.G−LCD(SG12232)駆動
汎用PICアセンブラプログラム
37. G-LCD (SG12232) привод
Общая цель PIC Assembler программа
登録日 2004年11月2日


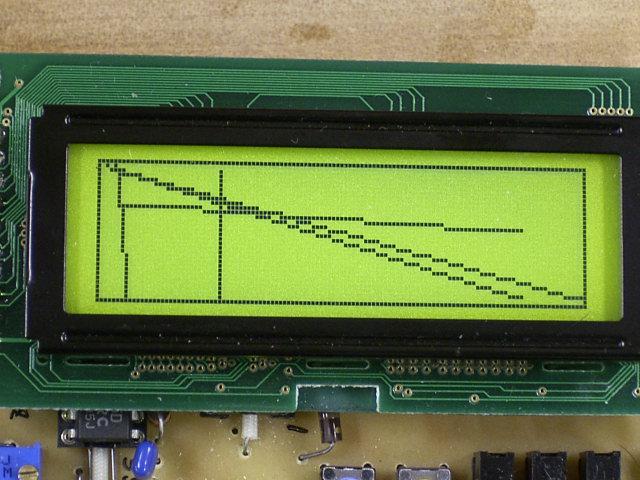
最近、小型で安価なG−LCD(SUNLIKE社 SG12232)を入手しました。 東京秋葉原の秋月電子通商からです。 このデバイスをマイクロチップ社のPICで駆動できるように、 アセンブラプログラムを書き上げました。写真が文字列の表示、ドットの描写、線分の描写例です。 G−LCDの画素数が少ないのが気になりますが、画面にxy座標系を仮想させて、 任意に作画できるルーチンをマクロ命令で用意しました。
使用したワンチップマイコンはPIC18F252です。G−LCDにはフォントが搭載されていないので、 アセンブラプログラム中にアスキーコードにのったフォントルーチンもある程度付加しています。 線分の描写には直線方程式を解くことで行っているので、著者が既に開発した、実数演算(浮動小数点演算) ルーチンも付加しています。詳細は論文をダウンロードして読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
36.GPS−3号
36. GPS-3
登録日 2004年10月22日
半自作GPSについては既報ですが、新たなシステムの開発中に、GPS−2号が使用するPIC18F252 によっては、動作不良を起こす場合があることに気がつきました。PIC動作電源電圧を3.3V としていたために、EEPROMへの書き込みが正常に行われない場合が、素子によっては起こっていたようです。 PIC周りの電源電圧を5Vとした回路とし、変更ついでにクロック周波数を20MHzから40MHzともしました。 写真の上がGPS−2号、下が今回紹介するGPS−3号です。詳細は論文をダウンロードして読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
35.PICと実数・関数演算−その4−
35. PIC и реальные и функциональные операции - Часть 4
登録日 2004年 9月 8日
PIC18F252で実数・関数演算を実行する為に、マクロチップ社の純正アセンブラMPASM で書き上げたアセンブラプログラムは、第1版、第2版、第3版として公開済みです。第4版を作りました。 改正点は以下の通りです。
(1)第3版にあった、対数関数での収束生の悪さを修正しました。原因は代入するべき定数値に正しい数値が入っていなかった点にありました。
(2)その他の修正を行っています。詳細は論文を読んで下さい。
(3)6種の比較関数を新たに付加しました。
(4)以上で、以下の演算が行えるまでになりました。
実数の四則演算(当然整数の四則演算も可能)
ルート
サイン
コサイン
タンジェント
アークタンジェント
アークサイン
アークコサイン
指数関数
対数関数
比較関数
(5)第1版で紹介している自前電卓のPICに書き込んでいるアセンブラプログラムを、 この第4版で書き換えて、正常に動作するでしょう。
ここで公開したフリーソフトを読者のアセンブラプログラムに貼り付ける ことで、実数演算・種々の関数演算を行うことができます。
詳細は報告書を読んで下さい。
論文、プログラム群などをダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
34.LPSの製作−その2
34.Производство LPS (Локальная система измерения)-2
登録日 2004年 5月23日
LPS(局地計測システム)の製作(=1号)については、既報です。今回、 グラフィック液晶ディスプレイ(G−LCD)を付加した2号システムを製作しました。
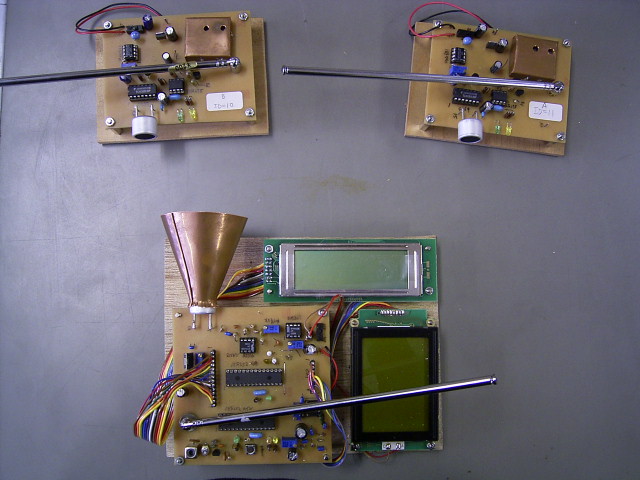
写真で示している上側の2台の固定局は、1号でも使用しているものです。下側が2号の移動局です。 移動局の位置座標値がC−LCDに描写されるのは1号と同じですが、新たに、 G−LCD画面には、画面を計測領域平面として、 移動局の位置がドットとして描写され続けます。移動局の右下の黒枠がG−LCDです。 リアルタイムで、移動局の位置情報が視認できます。
2号では、ラジオ波発振回路の変更、使用するC−LCDの機種の変更を行っています。 より分かり易い位地計測システムとしたつもりですですが、問題もあります。使用したG−LCDが使いにくいのです。 そのため、G−LCDを専用にドライブするため、もう1つワンチップマイコンを 使用せざるを得なかったことです。本報告を参考にする際には、このG−LCDの使用は止め、 携帯電話などに使用されている小型で高解像度の データメモリ付きのG−LCD等が使用できれば、結構面白いシステムになるのではないでしょうか。
詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
33.外部EEPROMを付加したPIC回路(学生作)
33. Схема PIC с внешним EEPROM (студенческая работа)
登録日 2004年 4月22日
PICワンチップマイコンシリーズには、データ保存用のEEPROMが内蔵されている素子があります。電源を切っても、必要なデータを保存しておき、再起動時に既存データとして利用することができます。結構便利な機能です。が、その容量は小さい。
大きな量の不揮発データを残しておき、再利用したいならば、一般のEEPROMにそのデータを書き出すことになるが、その際には、通常は専用のEEPROMライターが必要となる。これでは非常にやりにくいうえに、面倒である。
灯台もと暗しの感がありますが、マイクロチップ社から、PICの論理レベルで書き込み、読み出しができる シリアルEEPROM−IC(24XXシリーズ)が提供されています。通常のEEPROMはアドレス線、データ線をパラレルに持っているので、足ピン数は多い、が、この24XX−ICはシリアルなので、足ピン数は8個です。極めて小型です。メモリ容量も64kビットから512kビットと小型ながら結構な大きさの容量を持っています。
表題のとおりの回路をテストボード上に組み上げ、プログラムを作成しました。PICからデータを24XXに書き込み、そして24XXからデータを読み出すことができます。今回は写真はここでは提示しません。論文の方を参照して下さい。 また、回路動作のモニター用にキャラクタLCDを用いています。これの制御に一工夫がしてあります。キャラクタLCDを制御するのには、データコード及び命令コード用に8本、制御線として3本の、合計11本の線が必要ですね。PIC のI/O端子を結構使用します。この回路ではシリアル−パラレル変換ICを適用することで、3本だけでできるようにしています。1つICが増えることになりますが、場合によっては重宝な回路となるのではないでしょうか。
詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
32.PICと実数・関数演算−その3−
32. PIC и реальные и функциональные операции - Часть 3
登録日 2004年 3月27日
訂正日 2004年 5月25日
(2004年5月25日 訂正:圧縮ファイル中の論文ファイルが執筆途中の原稿でした。 本日差し替えておきました。ついでに、HEXファイルも追加しておきました。)
PIC18F252で実数・関数演算を実行する為に、マクロチップ社の純正アセンブラMPASM で書き上げたアセンブラプログラムは、第1版、第2版を公開済みです。第3版を作りました。 改正点は以下の通りです。
(1)第2版にあった、若干のバグを修正しました。
(2)指数関数演算、対数関数演算を、新たに付加しました。
(3)以上で、以下の演算が行えるまでになりました。
実数の四則演算(当然整数の四則演算も可能)
ルート
サイン
コサイン
タンジェント
アークタンジェント
アークサイン
アークコサイン
指数関数
対数関数
(4)第1版で紹介している自前電卓のPICに書き込んでいる第1版、第2版の アセンブラプログラムを、 この第3版で書き換えて、正常に動作するでしょう。
ここで公開したフリーソフトを読者のアセンブラプログラムに貼り付ける ことで、実数・関数演算を実現することができます。
詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
31.LPS(局所位置計測システム)の製作
31.Производство LPS (Локальная система измерения)
登録日 2004年 2月13日

位置計測にGPSが広く使用されています。地球規模での計測が可能ですが、 電波の届かない室内などでは全く役に立ちませんし、近距離間計測には向きません。
室内、体育館などでの掃除ロボットを考えていることは既報です。そのためには、どうしても、 位置情報を取得する必要があります。その他への応用も考えて、局地的な位置測システムを ラジオ波、超音波、ワンチップマイコンを利用して構築しました。
局地位置計測システムということで Local Positioning System=LPS と命名しました。
計測領域の境界当たりに2台の固定局を配置しておきます。領域内を動き回る1台の移動局で、 領域内における自分の位置情報を修得することができます。提示している写真が、動作試験中の様子です。 実験室内の窓側のテーブル上に約4m離れて、2台の固定局があります。左側の黒い人物が移動局を手にして、 測地をしている様子です。現時点では計測可能領域は10m四方程度、計測精度はcm程度です。 移動局のワンチップマイコンには、三角法で位置座標を求める為、既報の実数演算ルーチンが貼り付けてあります。
移動局にはラジオ波発振器、超音波受信機、固定局にはラジオ波受信機、超音波発振器が組み込まれています。 移動局からラジオ波で各固定局に超音波パルスの発信を要求させます。各固定局はそれに応じて、超音波を発振します。 この超音波の伝達遅延時間より、移動局と各固定局との距離を算出し、それをもとに三角法で移動局の位置を 決めます。
ラジオ波の送受信アップ、と共に、超音波の送受信の性能アップを行えば、数百m四方での測地 もできるでしょうし、固定局を3台以上用いれば、3次元位置情報も修得することができるでしょう。
現システムの製作費用は1万円以下です。性能向上と共に費用は高くなるでしょうが、 拡張性のあるシステムと考えています。
詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
30.PICと実数・関数演算−その2−
30. PIC и реальные и функциональные операции - Часть2
登録日 2004年 1月26日
PIC18F252で実数・関数演算を実行する為に、マクロチップ社の純正アセンブラMPASM で書き上げたアセンブラプログラムは、公開済みです。既報を第1版とし、第2版を作り上げました。 改正点は以下の通りです。
(1)第1版にあった、若干のバグを修正しました。
(2)仮数と指数の符号ビットの設定に変更を加え、movff で一気にデータの引き渡しが できるようにしたので、プログラムはより見やすく、かつ構築しやすいものになりました
(3)三角関数、逆三角関数の演算アルゴリズムに、新たにCORDIC法を採用しました。
(4)実数の四則演算、ルート、サイン、コサインの計算プログラムは第1版で紹介していますが、 この第2版では、新たにタンジェント、アークタンジェント、アークサイン、アークコサイン の計算ルーチンを付加しました。
(5)第1版を参考にした自前電卓をお持ちの方は、この第2版のアセンブラプログラムを そのまま移植することで正常に動作すると思います。
(6)性能、精度の詳細は第1版を見て下さい。
C言語を利用したPICのアセンブラコンパイラは市販されていますが、高価(5万円から7万円?)です。 高級言語なので自在に文章や式を記述することで、PICのアセンブラを知らずとも、 それを直接、アセンブラに翻訳してくれます。PICのアセンブラはデータ移動命令、制御命令など良くできています。が、実数・関数演算ができませんでした。ここで公開したフリーソフトを読者のアセンブラプログラムに貼り付ける ことで、実数・関数演算を実現することができます。C言語コンパイラのように余計な言語を全く習得する必要はありません。役に立ててみて下さい。
詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
29.DTMF信号を応用した遠隔制御−その2
29. Дистанционное управление с помощью сигнала DTMF - Часть 2
登録日 2003年 11月17日
表題のシステムは既報済みです。それを1号として、今回改良型の2号を 製作しました。1号では、電話のキーボタンを押すのに、ギア付きマイクロモータ で行っていました。モータの専有面積が結構大きいので、 多数のキーを押すことはそのままでは無理そうでした。
今回、改良案としてソレノイドと、カメラのリリーズ機構似を採用し、電話の全てのキーボタンを押せるようにしました。1号が晴天用ならば、2号は全天候型といえましょう。
写真が2号です。1号と似ていますが、台車から、電話のキーバット面に、リリーズが伸びているのが判るでしょう。これならば、カメラ&テレビ付きの携帯電話で リアルタイムで画像を見ながら、遠隔操作できるでしょう(残念ながら、著者は未だその様な電話を持ち合わせていませんので、未だ試してはいません。が、出来るはずです!!!)。
メーカーでもこのようなシステムを出荷しているよう、或いは予定のようですが、公開する 本システムでは、写真に示している側の 電話は簡単に脱着できます。電話には何も加工もしてません。取り外せば、通常の電話として 使用できます。自分の電話を装着して、本システムを待機状態としておきます。 外出先で、友達の電話でも借りて、操作する。というアイデアもあります。
老人の看護監視システムとして、極めて安価に提供できるのではないでしょうか。
詳細は、報告書を参照して下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
28.GPS−2号
28. GPS-2
登録日 2003年 9月17日
改訂日 2004年 4月 8日

2004年4月4日、アセンブラプログラムにバグが見つかりましたので、訂正しました。
現象:高度差の符号が逆に表示される場合があった。
原因:1箇所、文字zとすべきところが、xとなっていた。
詳細:アセンブラプログラムの注釈を読んで下さい。
自前のGPSシステムの製作については既報です。今回、このシステムの改良型を製作しました。 前のシステムを1号、今回のを2号とします。写真が現物です。外見、内見共に1号と殆ど変わりません。 改良点は以下の通りです。
(1)ワンチップマイコンをPIC16F876から最新のPIC18F252に変更。 この2つはピン互換性があるので、2号と1号の回路図は全く同じです。
(2)数値演算処理ルーチンとして、1号で開発使用した多数桁整数型数値演算法は全て捨て去り、 既報の「PICと実数・関数演算」で紹介している実数・関数演算ルーチンを使用しました。
(3)1号は、東経と北緯の領域内を考えて経度方向、緯度方向の移動角度量を 計算表示するようにしていましたが、これを全地球的規模で正しく計算表示できるようにしました。
(4)1号では、移動距離量を算出するのに、関東付近での換算値を使用していました。従って、 関東から離れた場所では、当然誤差が大きくなっていました。2号では、原点の緯度から この換算値を算出するようにしたので、何らの対応をしなくても全地球的規模での移動距離量を より正確に算出表示するようにしました。と言っても、球体である地球を局部的に平面と見なした 算術で計算していますので、数百km以上の距離、極点近傍では誤差は免れません。
1号をバージョンアップすることが出来ます。使用中の16F876を18F252に取り替えます。 10MHzのセラロック発振子を20MHzのものに取り替えます。これだけです。
詳細は、報告書を参照して下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
27.PICと実数・関数演算
27. PIC и реальные и функциональные операции
登録日 2003年 7月16日
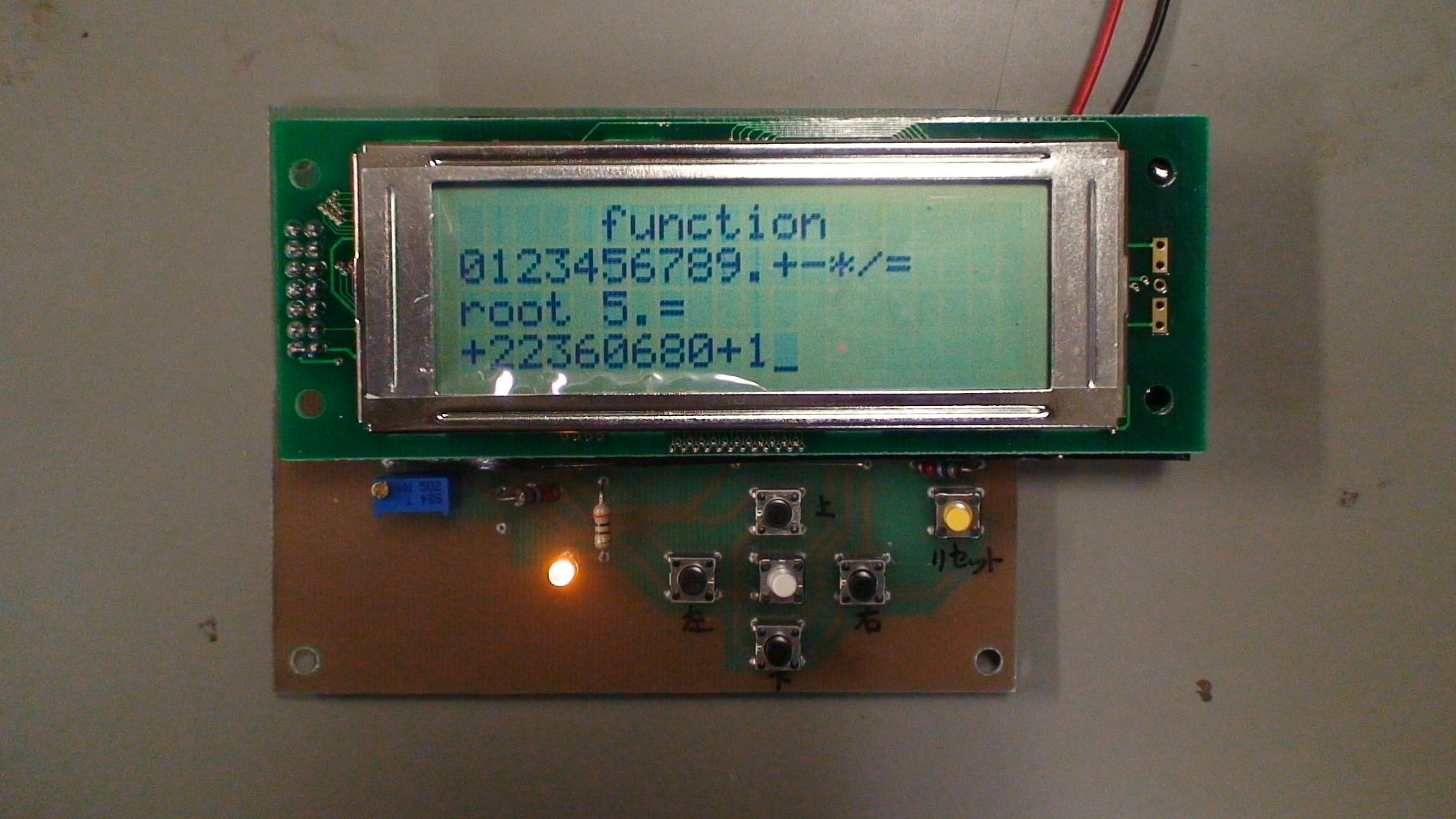
マイクロチップ社のワンチップマイコンシリーズの最新版であるPIC18F252 を用いて、実数四則(加算、減算、乗算、除算)演算、三角関数演算、平方根演算が出来るアセンブラ プログラムをマイクロチップ社の純正アセンブラMPASMで書き上げました。
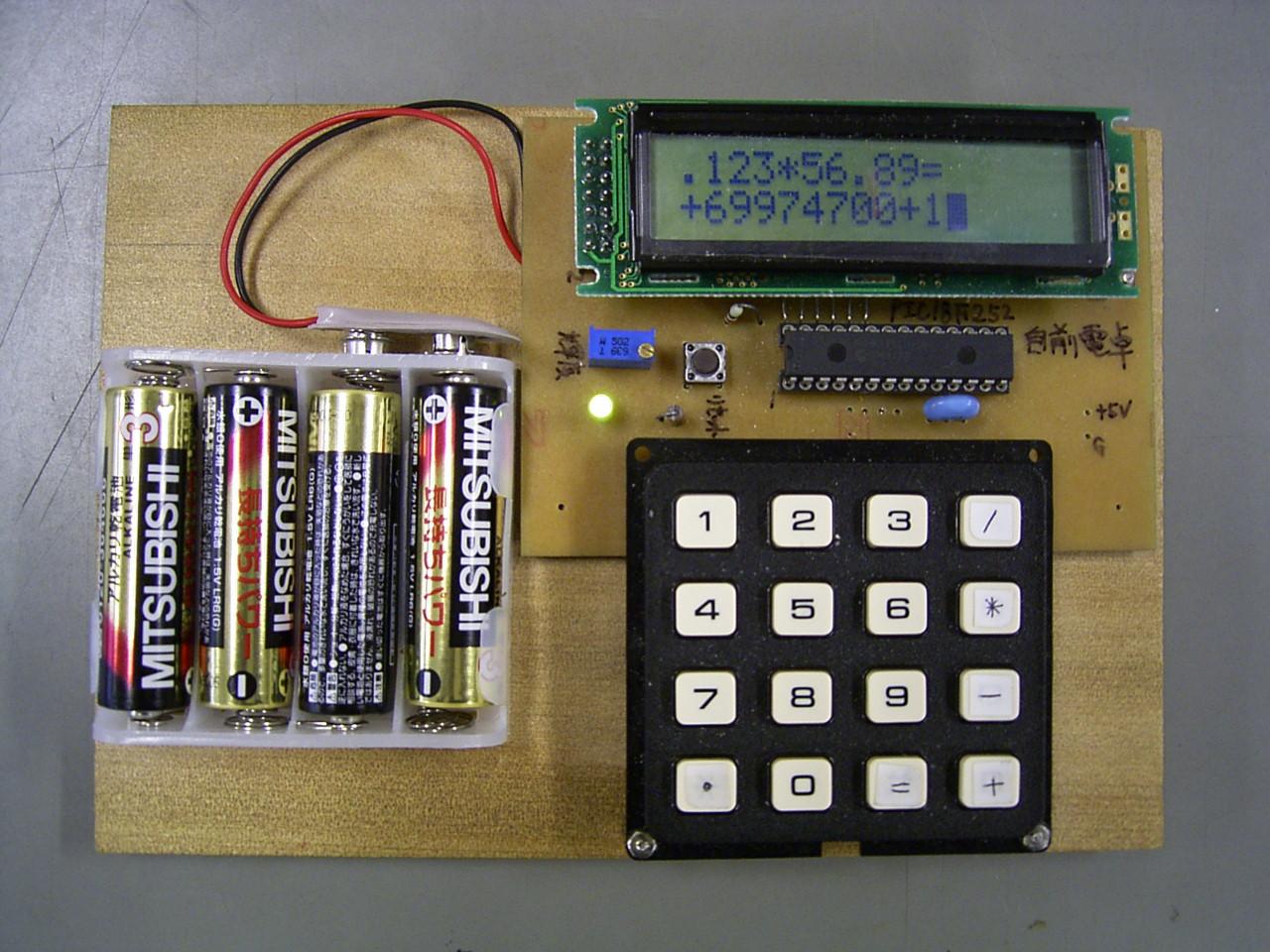
写真は今回のアセンブラプログラム開発のために製作した「自前電卓」です。当面の利用目的事情から 現時点では、プログラム中で処理できる 実数範囲は±99999999.×10^(+8)〜±.00000001×10^(−8)、 有効数字は8桁です。キーパットからの入力時は±99999999.〜±.00000001、 有効数字は8桁です。 提供するアセンブラプログラムが理解できれば、必要に応じて、有効桁を大きくすること、実数範囲を大きくするのに それほど手間はかからないでしょう。 三角関数はサインとコサインを計算しますが、有効桁8桁当たりまで精度があります。平方根も同じ程度の 精度があります。
肝心の実数・関数演算に使用するレジスタ類は全てバンク5のレジスタを使用し、 一般のPICの開発に支障がないようにしています。キーパットとLCDを使用しない場合ならば、 提供しているプログラムの 実数・関数演算に関した宣言部分と実数・関数演算ルーチン部分をユーザーの プログラムに貼り付けることで、容易に演算結果を得ることが出来るでしょう。
なを、18シリーズと、16,17シリーズではコンフィグレーションビットの設定、 データテーブル(ルックアップテーブル)の使用方法に大いなる相違があります。 このプログラムを参照すれば、充分に役に立つと思います。
詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
26.全方向移動システム(学生作)
26. Всенаправленная мобильная система (работа студента)
登録日 2003年 3月21日

最近、色々なロボットが作られています。その動作性、機能性は日進月歩の感があります。 我が研究室では、永年、室内の大きさを認識し、室内の障害物を記憶し、かつ避けながら、 掃除したところと掃除をしていないところを認識し、室内の掃除ができるロボットを 夢想してきました。確実な位置認識方法は未だ見いだせないでいますが、そのための第一段階として、 学生が卒業研究の課題として、平らな床の上で、全方向に移動できる台車システムを 試作しました。写真がそれです。
今のところは台車は自立して移動しません。操縦者が手にしている制御装置で操作棒 (ジョイステック)を動かすことで、3輪の付いた台車は、3輪の方向を変更(模型用の サーボモータを使用しています)し、3台のDCモータも正逆回転させ、 自在に任意の方向に移動します。自転もします。台車と制御装置の間は赤外線で 通信を行っていますので、制御できる距離は今のところ2m以内ですが。
これも試作品であり、様々な改良案があります。 制御装置の代わりに、台車の周りに接触センサ、距離センサなどをを取り付ければ、 一応自立型とすることは出来ます。今後、機能性を追加もし、色々な改良をしていきたいと 考えています。詳細は報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
25.癒しのUFO
25. Исцелённое НЛО
登録日 2003年 1月31日

最近、室内の水槽内でゆったりと動くクラゲや魚などのロボットを見ました。 水中ではなく、室内の空間中で動けるロボットならば、それも面白いのでは 無かろうかと考えました。が、ロボットを、空中にぽつねんと浮かばせる機構が 頭に浮かんできません。
仕方がないので、苦肉の方法として、釣り糸でロボットを吊り下げること にしました。形状はアダムスキー型のUFOロボットとしました。写真が一応の完成品です。 室内が薄暗ければ、吊り糸は全く見ません。
円盤の大きさは20cm程度です。重さは450g。透明なアクリル半球と、 アクリル円盤が外壁なので、内部が透けて見えます。
UFOは耳を持っており、単発の手打ち音を聞かせると、停止し、 2連発では上昇、3連発では下降します。連発を継続すると、低速、中速、 高速で上下します。エンドレスで上下運動を繰り返します。 周りにLED群を配置しており、状況に対応して、 点滅状態も変化します。超高輝度青色LEDをサーチライトの如く 点灯もします。UFOらしくアラーム音も発します。
見ていて、少し癒しを感ずるという学生の意見を採り入れ、「癒しのUFO」 と呼称しました。試作品であり、様々な改良方法があります。詳細は 報告書を読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
24.茶運び人形(報告書の改訂版)
24. Чай-провезённая кукла (пересмотренная версия отчета)
登録日 2002年12月29日
先に、茶運び人形を紹介しておりましたが、ダウンロードできる報告書中には各部分の写真を 掲載しておりませんでした。当時、アナログカメラで撮影し、それを焼き付けた写真を製作論文中 に掲載しておりました。従って、そのままではpdfファイルに掲載できなかったかったので ダウンロードできるpdfファイルには写真、資料は掲載しておりませんでした。
その後、何人の方から写真についての問い合わせがありました。スキャナーも手に入ったので、 今回、アナログ写真をスキャナーで取り込み、論文中に貼り付けました。 参考にした資料は重すぎるので、今回も削除しました。必要な方は図書館などで検索して下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
23.DTMF信号を応用した遠隔制御(+学生作)
23. Дистанционное управление с помощью сигнала DTMF (работа студента)
登録日 2002年11月21日

プッシュホン式電話のキーボタンを押した時に鳴るピ、ポ、パというDTMF信号の音を利用した遠隔制御 システムとしていろいろなものが提案されています。本研究室でも昨年度から、この遠隔制御の研究に 取りかかっていました。目標はカメラ付きのPHS(又は携帯電話)を用い、遠方より、実画面を見ながら 必要な遠隔操作をリアルタイムでするシステムの構築です。
ごく最近、富士通が同じようなシステム方法の遠隔制御ロボットを発表し、来年度から20万円ほどで 販売する、というニュースを目にしました。研究室では、まずカメラのない手持ちのPHSでの システムを構築し、カメラ付きのPHSが手に入ったらそれに交換するという方針で開発してきていました。 大企業の製品には比較にもなりませんが、小さな研究室でもその様なシステムを研究していたこと、 その様なシステムでも自前で開発できること、等と考え、まだカメラを搭載させていませんが、 一応出来ましたので、ここで公開します。
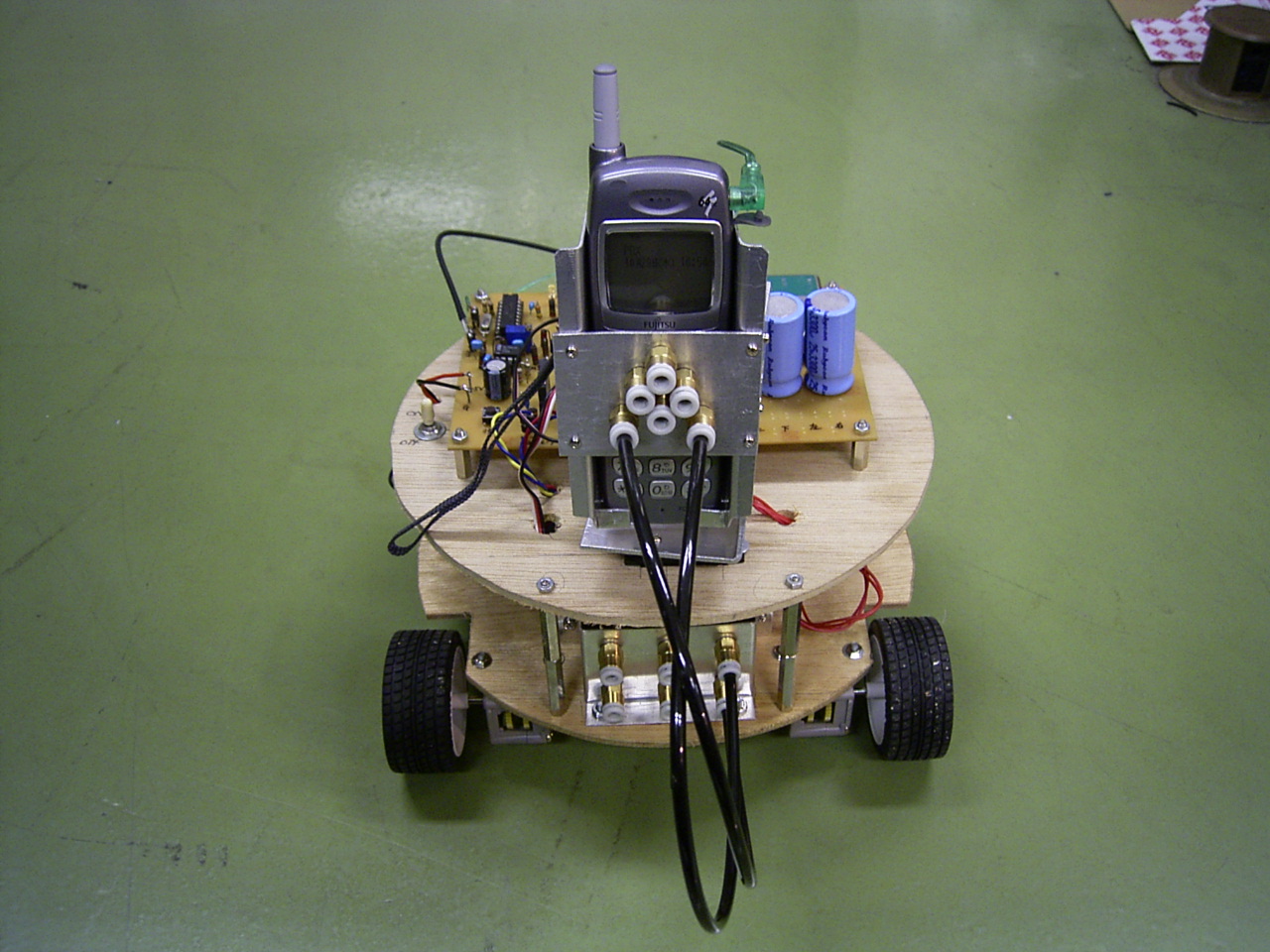
写真はデモ動作中の制御される側の様子です。車輪で前後左右に動き回り、PHSは前後左右に 頭のように動きます。PHSにお面や人形の頭を取り付け、台車には着物でも着せたら、可愛い ロボットとして、遊べそうです。
本システムを参考にすれば、カメラ付きのシステムに容易に改造できると考えています。 その様になれば、遊びのロボットとしてだけではなく、家屋、工場、その他諸々の現場において 様々な遠隔制御ができる実用システムとなりそうです。自前なので、様々な 応用例が考えられます。
私の方では、カメラ付き電話の入手次第、改造しようと考えています。 詳細は報告書をダウンロードして読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
22.16ビットデータロガーの製作
22. Производство 16-битного регистратора данных(Data Logger)
登録日 2002年10月28日
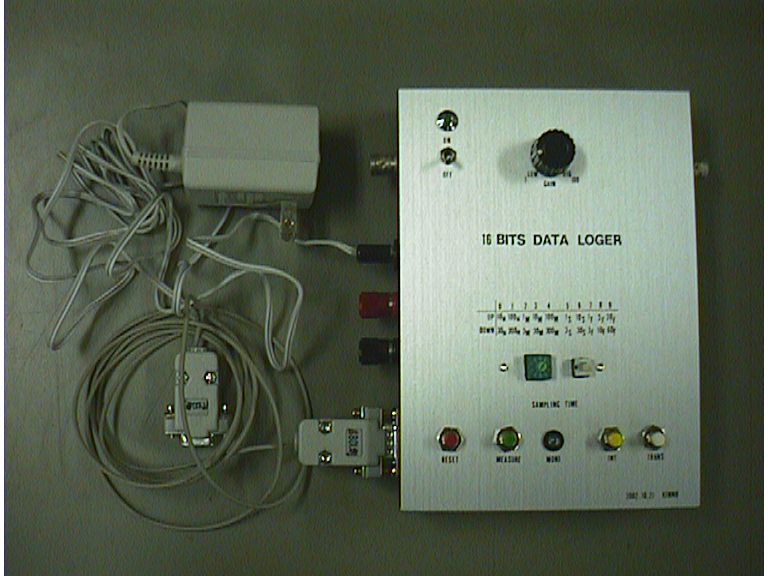
10ビットのAD変換器を内蔵し、PICワンチップマイコンシリーズでは最高位素子である 17C756を用いたアナログデータメモリ、データロガーは既に紹介済みですが、 10ビットではなく、より変換精度の高い16ビットのデータロガーが、最近、 必要となり、製作しました。実物を写真で示しています。使用は至って簡単です。 先の実績があったので、製作日数は数週間でした。 ここでの紹介を参考にし、部品がそろっていれば、1,2日以内で16ビットデータロガーを 自前することが出来ます。製作費用は2万円程度です。
パラレル16ビットAD変換器(AD976 アナログデバイセズ社)を用い、17C756は制御用に用いています。 性能は、入力は1チャンネル、最高サンプリング周波数は100kHz、許容入力信号電圧は−10V〜+10V、 分解能は約0.3mV、サンプリング時間は10μsから60分まで、20段で切り替え可能、 メモリ容量は32768ワード(1ワード=16ビット)です。電源はDCアダプタ、乾電池も使用可です。
このデータロガーで測定したデータをホストのパソコンで読み出し、データ解析ができる プログラムもVisual Basicで作成しました。 先に紹介しているように、データグラフを自在に加工処理が出来るプログラムです。印刷もできます。 詳細は報告書をダウンロードして読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
21.PICを用いた「テルミン擬き」の製作
21. Производство "псевдо-Термин" с использованием PIC
登録日 2002年7月19日
エーテル楽器とも呼ばれ、楽器の回りで両手を動かし、 楽器には全く手を触れることなく音楽を演奏する「テルミン」という楽器をご存じですか? 本来、テルミンは真空管と高周波発振回路等を用いて製作されたものですが、最近の複製品は それらの代用にトランジスタやICを用いた回路です。
PICの応用回路として、今回は光センサ、V/F変換器、PICワンチップマイコン、 D/A変換器、オーデオアンプなどを組合せ、高周波発振回路を用いることなく、 現代風に「テルミン擬き」を製作しました。写真がそれです。テルミンのアンテナの替わりをするのが、 光センサです。光センサの上方で両手の位置を変えたり、その形状を変化させることにより、テルミンらしく 演奏することが出来ます。自信を持って曲を奏でるには鍛錬が必要なことは、テルミンと同じです。
音色は一応4色、音域は5オクターブから8オクターブまでを選択できます。音色としてサイン波を合成して 楽器の音色を2種用意したのですが、まだまだであり、改良の余地は沢山あります。 詳細は報告書をダウンロードして読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
20.PICを用いたキャラクタディスプレイの製作(学生作)
20. Производство отображения символов с помощью PIC (студенческая работа)
登録日 2002年6月4日
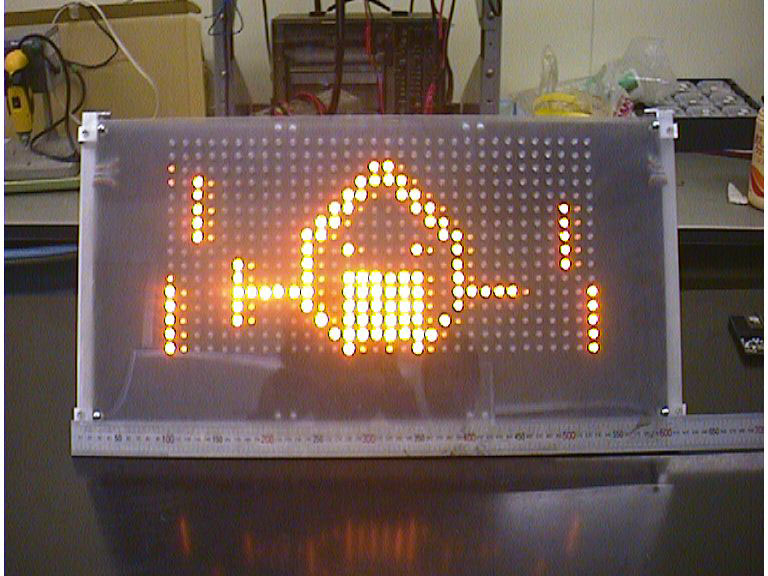
近年、町中を歩いていると、LEDを利用した様々な電飾を見かけますね。 その一つにLEDディスプレイがあります。店舗の看板や宣伝用の掲示板としてよく利用されるようになってき ています。「学園祭用の電飾を作れないか?」との問い合わせに答える形で、自作しました。写真に示している ようなキャラクターアイテムが動き回ったり、宣伝文字を描写することが出来ます。
大量販売の高輝度LEDと中古のROMを使用し、制作費を安くしています。表示データの生成は、パソコン上の プログラムで行い、それをROMに焼き付けることで多種多様の表示画面とすることが出来ます。 詳細は報告書をダウンロードして読んで下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
19.PIC16F876を用いた半自作GPSシステム
19. Полу-самодельняя система GPS с помощью PIC16F876
登録日 2002年5月3日

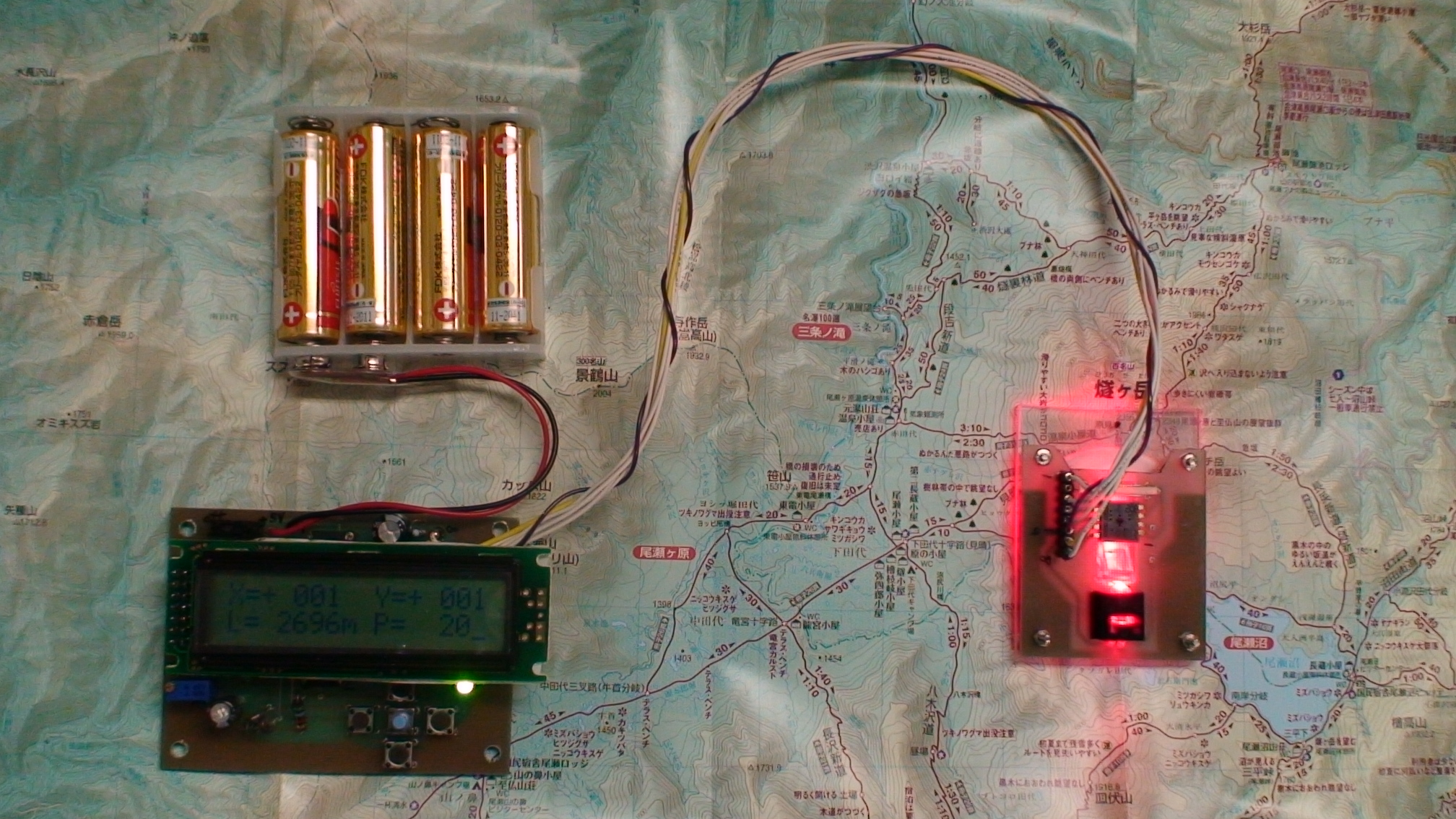
写真のような手の平に納まる小型・軽量な「半自作」のGPSシステムを作りました。LCD画面には小山高専電子棟の緯度、経度、高度が表示されています。右の黒い四角がアンテナ。電源、GPS本体、制御用PIC、LCD表示器はスチロールケース内に納まっています。GPS専門の会社から同じようなシステムが販売されていますが、この作品は受信機、アンテナ以外は自作です。従って、受信したデータを制作者の希望に添って自在に加工・処理することができます。今のところ、
(1)測地点の緯度、経度、高度の表示、
(2)任意に設定できる原点からの緯度差,経度差、高度差の表示、
(3)原点からの東西方向への移動距離、北南方向への移動距離、高度差の表示、
(4)原点からの直線距離の表示、
の各機能があります。
電源は単4電池×4本で約4時間の連続使用ができます。原点のデータはEEPROMに書き込んでいるので、消えることはありません。断続的に使用すれば、何日間でも使用できます。
小山市内での試験測定は良好でした。小山から尾瀬に行き、ヒウチ岳の頂上までの途中途中での試験測定も試みました。良好でした。電波、その他の状況が良ければ、誤差は±10m程度内、悪くても±30m程度内と見ました。登山、オリエンテーリング、未知の土地などでのナビゲータとして使用するには最適とみました。
これを用いれば、超小型のナビゲータシステムを搭載した自動飛行装置など自在に自作できそうです。例えば、茨城県の大洗海岸から、アメリカのサンフランシスコまで無人ヨットの走行など。長距離飛行など。等。
書き込んだアセンブラプログラムは、A4版で60頁にもなってしまいました。
距離を999999mまで表示させることができるようにしていますので、数バイト長の加算、減算を行っています。また、ピタゴラスの定理に従って直線距離を求めるために、乗算、平方根を求めています。これらのルーチンはそれなりに利用価値があるのではないでしょうか。 詳細は、報告書を参照して下さい。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
18.PICを用いた完全自立型倒立振り子−その3(学生作)
18. Полностью самоподдерживий перевернутый маятник с помощью PIC - Часть 3 (студенческая работа)
登録日 2002年4月5日

倒立振り子の制御システムを、PICワンチップマイコンを用い、完全自立型で 作成しました。写真で見えるように、模型自動車の上に、振り子が立っています。 スタートさせると、模型自動車は振り子を倒さないように、左右に動き続けます。模型自動車には 電池、モーター、PICマイコン、振り子の傾斜角度計測用角度センサ、車体の移動距離計測用 ロータリエンコーダなど全てが搭載されています。
前回のものより、更に制御性能が向上し、出来具合も綺麗です。 完全に自立して、倒立を制御します。前回不十分であった原点回帰モード での動作特性が改善されています。数十分以上にわたって、 安定に制御動作させることができました。
詳細は、報告書を参照して下さい。
今までは、報告書しかダウンロードできませんでしたが、 圧縮ファイルとした報告書、プログラム、その他資料類をダウンロードすることができるようにしました(2004年9月3日対処)。
ワンチップマイコンを用いた完全自立型倒立振り子の制御の報告書類をダウンロードする
17.データロガーの製作
17. Производство регистраторов данных(Data Logger)
登録日 2002年3月5日

先に紹介している、ロジックアナライザと、アナログデータメモリを 合体し、2チャンネルの「データロガー」を製作しました。 PIC17C756と5.5インチカラーLCD、SRAMを用いています。 入力信号は−2.5V〜+2.5V、1倍から100倍までの利得があります。 1チャンネル分の記憶データ件数は約8000データです。測定後、LCD画面上で データグラフの拡大、縮小、左右移動などができます。サンプリング時間は 50μsから2sまで15段で切り替え設定ができます。 サンプリング時間は最高で50μsと遅いですが、高速の現象を測定しなければ、 アナログデータの記憶装置としては結構役に立つと思います。 この装置で測定したデータをパソコンで取り込み、データグラフの加工処理及び 印刷のできるプログラムもVisualBasic(V6)で書き上げてもいます。 詳細は、報告書を参照して下さい。
PDFファイルで書かれた報告書(16頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
「データロガーの製作」の報告書(1.3Mバイト)をダウンロードする
アセンブラプログラム類もダウンロードすることができます。
プログラム類その1をダウンロードする プログラム類その2をダウンロードする プログラム類その3をダウンロードする プログラム類その4をダウンロードする プログラム類その5をダウンロードする プログラム類その6をダウンロードする プログラム類その7をダウンロードする プログラム類その8をダウンロードする プログラム類その9をダウンロードする プログラム類その10をダウンロードする
16.鍵・錠システム−その2
16. Ключ и система блокировки - Часть 2
登録日 2002年1月15日
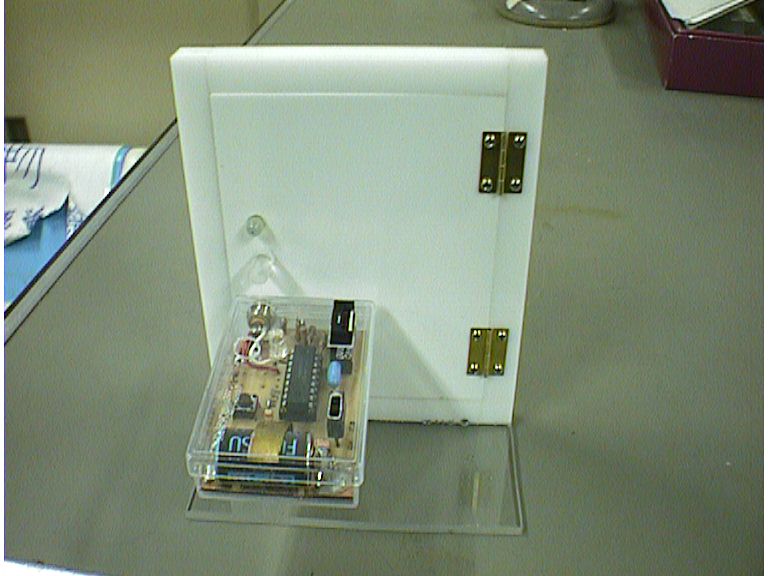
前回、「PIC16F84を応用した鍵・錠システム」を紹介しました。 が、制作したハード部は試作段階のものであり。展示・デモンストレーション による紹介が不十分でした。今回、それらに耐えるように、模型であるが、 システムを再製作しました。
手前味噌ですが、本鍵錠システムは現状のシリンダー錠などで代表される 機械的な鍵錠システムと比較すると、複雑な機械加工は全く必要としないので、 構造は極めて簡単になっており、製作は容易でかつ安価です。また、 近年出回っているマグネット・キーの用に、特殊な鍵の構造は持っていないし、 錠側に電源も必要としません。これは同様にカードキーに対する本システム の利点です。暗証コードを使用者自身で自在に変更できる点、一つの鍵で 複数以上の錠に対応させることができる点、も本システムの良点であると 考えています。
PDFファイルで書かれた報告書(5頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
「鍵・錠システム−その2」の報告書(106kバイト)をダウンロードする
PICに書き込んだアセンブラプログラムもダウンロードすることができます。
プログラム類その1をダウンロードする
プログラム類その2をダウンロードする
15. Производство "Кошки" вместо "Мышь" (студенческая работа)
これは学生が製作しました。
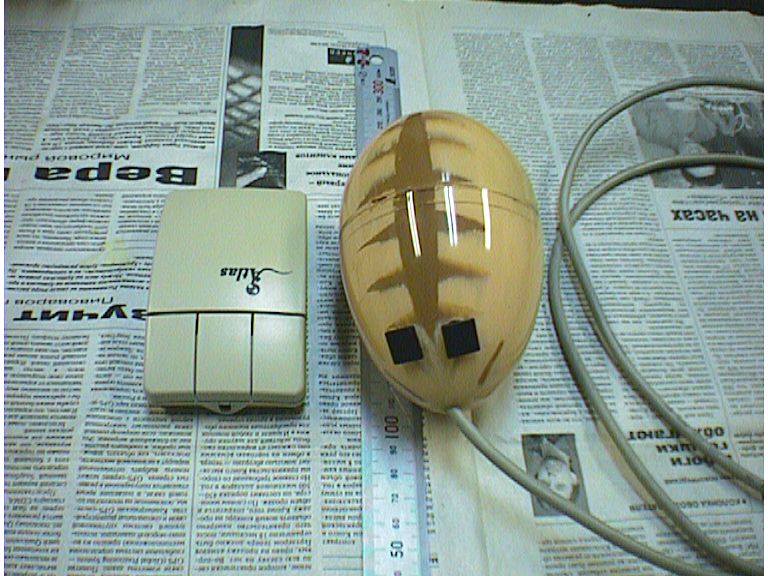
傾斜センサシステムと同じく2軸加速度センサ(よりむしろ2軸傾斜センサと呼ぶべきでしょう)ADXL−202を用いたHID(human interface device)の一種です。
写真の左が通常のマウス、右が製作した猫です。マウスには下側にボールがあり、 平らな物の上でそれを滑らすことで、x、y方向の移動量を求めていますね。そして、画面のカーソルを動かしています。必ず、機械的な接触をさせなければなりませんね。それに対して、右の猫は、ボールは持っていません。猫を空中で自在に動かしたり、傾けたりすれば、それに従って画面のカーソルが動きます。本当に人間に優しいデバイスです。
マウスと同じような機能デバイスですが、マウス、つまりネズミではないということで、猫と名付けました。
マウスの左右スイッチと対応させて、猫の目の部分に同じスイッチを取り付けてもいます。ここでは仕様を簡単に説明します。詳細はPDFファイルをダウンロードして読んで下さい。
この猫はUSBでパソコン本体と接続します。USBターゲット・コントローラ は、National Semiconductor 社の USBN9603 を、猫の制御素子として PIC16F873を使用しています。猫の外形は市販のマウスの外形でも良いのですが、マウスではないので別の箱を用いています。アクリル製卵形ケースです。 猫らしく見せるため、彩色しています。
論文及び関係資料をダウンロードすることができます(圧縮ファイル形式)。
圧縮ファイルをダウンロードする
14. Система датчиков наклона
アナログデバイス社の2軸加速度センサ(ADXL−202)を用い、 センサの2軸をxy軸、パソコンのCRT画面をxy画面と見なし、 傾斜度合いに応じて画面上の位置にスポットをリアルタイムで描写します。 つまり、センサの乗った ハード部を任意に傾けることで、CRT画面上でスポットを任意に移動させ ることができます。
ハード部とパソコンの間はRS−232C通信で接続しています。制御用に ワンチップマイコンPIC16F873を使用しています。
何に応用できるか今のところ良いアイデアはありません。ところで、通常カーソルはマウスの動きに従って、CRT画面上を動きますね。マウスは何かの上を内蔵しているボールを転がさなければなりません。ボールを機械的に、強制的に回転しないと カーソルは動かないわけです。が、このシステムを応用すれば、空中でこのハード部を空を切るように動かすことでカーソルを動かすことができるのではないでしょうか。そう思い、今卒研生がRS−232ではなく、USB通信としたシステムを作っています。ほぼ出来上がっています。マウスではないので「キャット」と銘々していますが、最近は「猫」と呼ぶことにしました。近日中に紹介できると思います。
PDFファイルで書かれた報告書(6頁、写真、図面付き)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
PICに書き込んだアセンブラプログラム、ホストパソコン用VBプログラム もダウンロードすることができます。
プログラム類その2をダウンロードする
プログラム類その3をダウンロードする
プログラム類その4をダウンロードする
プログラム類その5をダウンロードする
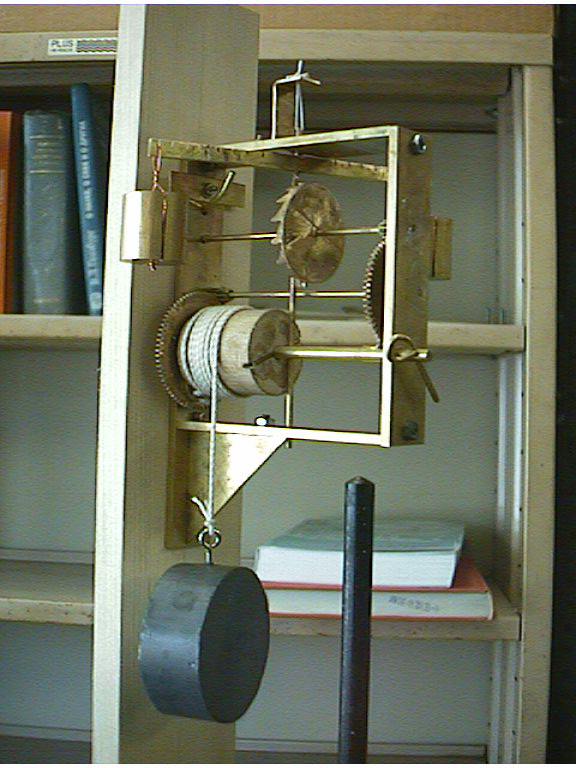
![]() 13.尺時計の復元
13.尺時計の復元
13. Восстановление "локтевых" часов
追記日 2020年8月13日
20年前の外観写真
これも20年前に製作した作品です。現在での動作の様子を動画としました。
先の柱時計(和時計)と比較すると、構造は簡単です。錘時計の原点です。写真は覆い箱を取り付けない 状態のものです。本体(ギアなどの納まっている四角形部分)の大きさは10cm×10cm弱です。 時間経過は錘の落下の長さで測ります。時間調整は天符の両端にぶら下がっている錘の位置を 変更すること、或いは主錘の重さをを変更することで行います。
詳細な完成図面が出来ています。
PDFファイルで書かれた報告書(18頁、写真、図面、原書資料付き)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。

連理を担いだ2体の人形を、収納容器を兼ねた階段上に置くと、交互に頭の上を飛び越えながら、 軽快に階段を下りて行きます。単に飛び越えさせるだけではなく、飛び越えるとき宙返りさせる こともできます。
写真は宙返りモードでのものです。これも学生の前でデモしますと、結構真剣に見入ってくれま す。???なぜなぜなせ。
装置全体の構造、人形及び連理の構造に力学的理解・技術的な技が見られます。
詳細な完成図面が出来ています。
PDFファイルで書かれた報告書(17頁、写真、図面、原書資料付き)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。

トリガチャンネル、、トリガソース、サンプリング周波数等を選択することができ、 LCD画面上に測定データが描写されます。データグラフの拡大・縮小、左右移動もできます。
PDFファイルで書かれた報告書(14頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
「10Mロジックアナライザの製作」の報告書(160kB)をダウンロードする
「40Mロジックアナライザの製作」の報告書(42kB)をダウンロードする
PICに書き込んだアセンブラプログラムもダウンロードすることができます。
![]() 10.段返り人形の復元
10.段返り人形の復元
10. Восстановление куклы-возвращения
追記日 2020年8月1日
20年前の外観写真
これも20年前に製作した作品です。現在での動作の様子を動画としました。
(20数年前の旧解説文)
容器兼階段及び人形の材料は木、竹、糸です。
動きの秘密は、人形の体内に入れてある水銀の微妙な動きと、それを可能にしている 人形の構造及び、階段の構造です。
人形の身長は14cm程度です。
学生の前でデモしますと、結構真剣に見入ってくれます。???なぜなぜなせ。
詳細な完成図面が出来ています。
PDFファイルで書かれた報告書(21頁、写真、図面、原書資料付き)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
「五段返り人形の復元」の報告書(10.1Mバイト)をダウンロードする
![]() 9.和時計の復元
9.和時計の復元
9. Восстановление японских часов
追記日 2020年7月23日

動画がインターネットで公開できるようになっていますね。20年前に製作した本作品の現在の様子の写真と、動作時の概観一周と時刻の鐘撞きの様子を公開します。

(20数年前の旧解説文)
同じく江戸時代の技術書「機巧図彙」を参考に、「和時計」も復元しました。 錘式の完全な機械時計です。歯車は殆ど自作です。
原書では干支時刻でしたが、12時刻制としました。定時刻になると、 その数だけ鐘を打ちます。「頭」の当たりに位置している鐘には、仏具の「お鈴」を用いました。 何とも言われぬ音を出します。天符の肩と錘が本体の外に出ていて、カチカチという音を出しながら前後に動きます。針は時針だけで、分針はありません。江戸時代のことですから、半刻より細かい時間の 概念は必要なかったからでしょう。
長方形本体の大きさはおおよそ10cm立方です。
製作には、当然ながら、旋盤や、フライス盤のような金属加工専用機は全く必要ありません。 江戸時代にはそのような機械はありませんでしたので。
これも詳細な完成図面が出来ています。
PDFファイルで書かれた報告書(37頁、図面、写真付き、原書の複写は省略)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
![]() 8.茶運び人形の復元
8.茶運び人形の復元
8. Восстановление чай-провезённой куклы
追記日 2020年6月27日
動画がインターネットで公開できるようになっていますね。20年前に製作した本作品に、少し修理を加えました。 概観一周と動作の様子を公開します。なを、作者は現在動画公開に関して全くの初心者です。
20数年ぶりに、この茶運び人形の報告書を更新することにした。以下の事情からである。
(1)20数年前の初稿では、大枚の写真を添付すると動作が重すぎたので、写真の大部分を未添付としていたことを忘れていた。復元製作記事であり、見本となる写真があることに越したことはない。当然であるが、原本には写真が添付していた。幸運にも、原本は手元に現有している。かつ、そのPDFファイルも記録媒体に残ってもいた。が、残念ながら、文書作成ソフト「一太郎」で書いたはずのファイルは残っていなかった、PGFファイルだけである。そういうわけで、既報の報告書を、原書通りのPDFファイルで差し替えることにした。茶運び人形の制作過程の写真が多数枚掲載されているので、A4版で50頁となっている。・・・・・・・・・・
以下詳細などは新しく追記した添付の報告書をダウンロードして下さい。
「茶運び人形の復元」の報告書(1.6Mバイト)をダウンロードする
(20数年前の旧解説文)
江戸時代の技術書「機巧図彙」を参考に、「茶運び人形」も復元しました。 主人が人形の両手にお茶碗を載せると、前進して行きます。客人が人形の手からお茶を 取り上げると、人形は停止し、お茶碗が戻るまで待ち続けます。お茶碗が戻ると、 独りでに方向転換をし、主人の方に歩いて帰っていきます。
ほぼ完全な復元です。必要な歯車も木製の手作りです。動力源であるゼンマイは当時は、 鯨のひげを用いていましたが、現在では入手困難なので、焼き入り鉄板で代用しています。
頭として、木のブロックを転用しています。これほどの大きさの人形の頭部を 入手するに何万円かかるかわかりませんので。
段返り人形の場合もそうですが、着物を着せていません。商品としてではなく、 科学技術工芸品としてみたときには、内部構造が見える方がよいと考えているからです。
身長は30cm弱です。
これも詳細な完成図面が出来ています。
PDFファイルで書かれた報告書(44頁、図面付き、写真と原書の複写は省略)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
ラジコンでFM帯域のプロポーショナル通信送受信機が広く使われていますね。 考えるところがあり、ワンチップマイコンPIC16C711を用いて1線式の プロポーショナル送受信機を簡易に作ってみました。
アナログが4チャンネル、デジタルが4チャンネルの計8チャンネルです。 使用しているICは送信側、受信側ともに1個のみです。 受信側のサーボには、双葉社のサーボモータを用いています。
写真の下が送信側です。4つのツマミ(可変抵抗)と、4つのオンオフスイッチがあります。
写真の上が受信側です。4つのサーボモータと、4つのモニター用LEDがあります。
受信側のツマミを回すと、対応したサーボがシンクロして回転し、オンオフスイッチを切り替えると、 対応したLEDが点灯/消灯します。
今のところ有線ですが、「1線」です。最近よく出回っているパソコンの端末間の データ無線通信機を転用すれば、 簡単に無線化できと思います。
この回路では、10m秒毎に、8チャンネルを同時に駆動制御しています。従って、 驚いて欲しいのですが、この方式で、アナログだけでも数十(40から50以上)チャンネルの同時 駆動制御が可能となるはずです。
PDFファイルで書かれた報告書(12頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
PICに書き込んだアセンブラプログラム(送信側と受信側の2つ)をダウンロードすることができます。
学生実験の制御分野の課題として、一般によく使用されている倒立振り子の制御システムは、 2m長以上の鉄のアングルのレール上で、 振り子を持った台車を、強力なDCモータで駆動していますね。台車の位置及び 振り子の傾斜角度も精密なロータリーエンコーダ用い、I/Oポートを装着した 外部にあるパソコンシステムで全体を制御しています。
そこで考えたのですが、ワンチップマイコンを用いれば、倒立振り子システムを、 模型自動車の上で実現できるのではないかと考えました。AD変換器が内蔵され ているPIC16C711を用いています。
振り子は車体の中央部に取り付けてあり、振り子の傾斜角度は自作のフォト・インタラプタ を用いて、完全に非接触方式で計測しています。
一応出来ました。電池も車体に搭載できるので、「完全」に自立型です。
車の長さは25cm程度です。
不十分なところもあります。動作モードは2つあります。一つはとにかく、 振り子が倒れないように、車体を前後に動かし続けるモードです。これは上手く行きます。
もう一つのモードは、特定の一定地点で、倒立制御を維持させ続けるモードです。結果として、 このモードでは動作の安定は10以内でした。結論は、プログラムは良いのであるが、 使用しているモーターの馬力不足と考えています。
PDFファイルで書かれた報告書(19頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
PICに書き込んだアセンブラプログラムをダウンロードすることができます。
マイクロチップ社のPICシリーズワンチップマイコンの最新種であるPIC17C756を用いた 回路として、アナログデータメモリを作成してみました。
このPICにはI/Oポートが50前後まで在ります。10ビットのAD変換器を有し、 AD入力端子は12チャンネルもあります。 RS−232C専用端子もあります。
4×4マトリックスキーボードとLCDを装備させ、LCDでモニターしながら、 キーボードを利用して、 装置の動作の選択や、サンプリング時間の入力が出来ます。
メモリには1M、或いは4MビットのRAMを2段で使用しています。従って 記憶容量は131k、或いは524Kバイトです。
サンプリング時間は20μ秒、〜255秒まで設定できます。
RS−232C出力端子もあり、記憶させたデータをパソコンで取り込むこともできます。
プログラムを自在に変更することで、必要に合わせて、様々な仕様が設定できると思います。
何度か改良を加えてきています。ハード部の回路図、アセンブラプログラムは最新のものを ダウンロードすることができます。
測定したデータの処理のためVisual Basicで処理プログラムも作成しております。 このプログラムも再三にわたり改良を加えています。最新のものをダウンロードすることができます。 アナログデータメモリ用に開発したデータ処理プログラムですが、取り込んだデータをグラフ描写します。 それ以外に、グラフの拡大、移動、スケールの変換、その他の機能を持たせた 「計測データグラフ処理ソフト」なので、このソフトだけでも様々な応用が出きると思います。
PDFファイルで書かれた報告書(10頁、何度かの報告書の抜粋)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
PICに書き込んだアセンブラプログラム、Visual Basic版データ処理ソフト、その他をダウンロードすることができます。
マイクロチップ社のPICシリーズワンチップマイコンの最新種であるPIC17C756は マイクロチップ社のライター「PIC start plus」に純正の専用アダプターを装着して書き込むことが 出来ます。が、何故か日本では販売しておらず、なかなか手に入りません。私は取次店を経由して、 購入しました。写真の上のアダプター部品がそれです。価格は2万円弱だったと思います。
自作することもできます。純正アダプターの納品に数ヶ月もかかり、その間に自作しました。 純正品の複製ではありません。写真の下のアダプター部品が 自作品です。「PIC start plus」の40ピンソケットにそのまま載せて使用します。
格安で出来ました。200円ほどです。
使用した回路はインターネットを乗りに乗って 探し当てたものです。
端子の結線は以下の通りです。
ライターの40ピン 68ピンPLCC型
DIP端子側 PIC17C756端子側
1 2,20,37,49
2 3
3 67
4 66
5 65
6 64
7 63
8 62
9 61
10、31 19,36,53,68
11 59
12 58
13 54
14 57
15 56
16 55
17 47
18 48
19 50
22 43
23 46
24 45
25 44
26 60
27 17
32 16
他の種類のPICを書き込むために格安で自作アダプターを作成したい方は以下のホームページに リンクしてみて下さい。(2000年12月29日には生きていましたが、現在生きているかどうかは定かではありません)
PICのワンチップマイコンを利用して、リモート計測システムを作ってみました。
写真の上が送信側です。
送信側には温度計などの4つのアナログセンサーが取り付けられ、PICでデジタルデータに 変換して、FM電波で送信されます。
受信側では、システムの簡易のため通常のFM受信機で送信された信号を受信し、 PICを用いてデータの復元を行っています。LCD表示器も装備し、 受信データの種類名及びセンサーの数値を表示することが出来ます。
極めて簡単なFM発信・送信回路としているので、今のところ数十メートルの通信範囲です。 性能のあるFM送信回路にすれば、通信距離は充分大きくなるでしょう。
PDFファイルで書かれた報告書(9頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
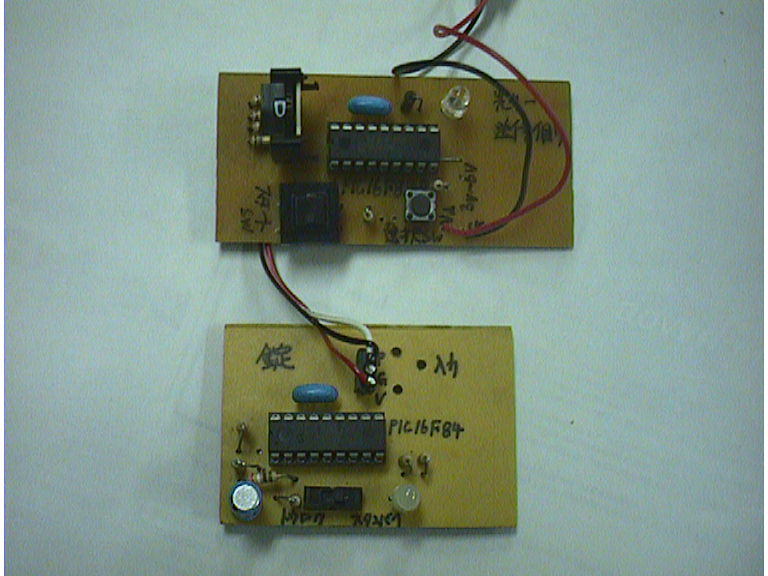
EEPROM内蔵のPICのワンチップマイコンを利用して、電子式鍵と錠の簡易なシステムの 試験版を作成しました。
盗難防止のため様々な鍵システムが実用化されているが、その道のプロにかかると わけもなく開錠されてしまうのが現状である。ここで公開するシステムは至って簡単な方法である。 不正な方法で開錠することも容易にできのであるが、ただしそれなりの時間を必ず必要とするの である。正当な鍵を用いた時に、数秒以内で開錠するように設定していれば、不正な方法で開錠 しようとすれば、数ヶ月はかかることになる。
問題もあります。短期間に合い鍵を作ることができないので、正当な鍵を紛失すると、 ひと騒動となることです。そのためには前もって、合い鍵をコピーして作っておけば 良いのですが。
写真の下側が錠、上側が鍵です。鍵側のピンジャック端子を錠側に差し込み、ボタンを押します。 鍵側から送信されるコードを錠側が読みます。錠側に登録されたコードとそれが一致すれば、 開錠の印として、LEDが点灯します。
錠側には電源は不要です。鍵側から供給します。
鍵と錠に割り当てるコートは鍵側で簡単に登録することができ、それを又簡単に錠側に 記録させ、錠のコードとすることができます。変更も容易です。
コードとして10進数6桁の数値を6種類登録できます。詳細はPDFファイルを参照して下さい。
PDFファイルで書かれた報告書(6頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。
回転角速度を検出できる超小型の角速度センサ(村田製作所製、ENC−03J)を用いて、 物体の回転角度量を計測し、モニターであるCRT画面にリアルタイムで変位位置を表示する システムを構築しました。
センサから出力されるリニア電圧データをデジタル値にAD変換するため、そしてパソコンとの インターフェースのためワンチップマイコンPIC16F873を 使用しています。
パソコンとの通信はRS−232Cです。そのため、専用ICであるADM232も用いています。 このハード部の制御及びCRT画面への描写のプログラムはVisual Basic で書いています。
簡単に物体の回転角度或いは回転位置を計測できます。が、それなりの欠点もあります。 小型で安価なセンサー故なのでしょうが、ドリフトの効果が大きいのです。短時間での 計測時にはそれほど気にはならないのですが、長時間の計測では何らかのドリフト対策 をしなければならないようです。
詳細は報告書をダウンロードして読んで下さい。
PDFファイルで書かれた報告書(6頁)をダウンロードすることができます。
ダウンロードする側にAdobe Acrobat Reader のソフトがインストールされていることが必要です。